 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZhiqing Wei
Target Localization with Macro and Micro Base Stations Cooperative Sensing
May 05, 2024
Addressing the communication and sensing demands of sixth-generation (6G) mobile communication system, integrated sensing and communication (ISAC) has garnered traction in academia and industry. With the sensing limitation of single base station (BS), multi-BS cooperative sensing is regarded as a promising solution. The coexistence and overlapped coverage of macro BS (MBS) and micro BS (MiBS) are common in the development of 6G, making the cooperative sensing between MBS and MiBS feasible. Since MBS and MiBS work in low and high frequency bands, respectively, the challenges of MBS and MiBS cooperative sensing lie in the fusion method of the sensing information in high and low-frequency bands. To this end, this paper introduces a symbol-level fusion method and a grid-based three-dimensional discrete Fourier transform (3D-GDFT) algorithm to achieve precise localization of multiple targets with limited resources. Simulation results demonstrate that the proposed MBS and MiBS cooperative sensing scheme outperforms traditional single BS (MBS/MiBS) sensing scheme, showcasing superior sensing performance
Spectrum Sharing Policy in the Asia-Pacific Region
Apr 25, 2024In this chapter, we investigate the spectrum measurement results in Asia-Pacific region. Then the spectrum sharing policy in the Asia-Pacific region is reviewed in details, where the national projects and strategies on spectrum refarming and spectrum sharing in China, Japan, Singapore, India, Korea and Australia are investigated. Then we introduce the spectrum sharing test-bed that is developed in China, which is a cognitive radio enabled TD-LTE test-bed utilizing TVWS. This chapter provides a brief introduction of the spectrum sharing mechanism and policy of Asia-Pacific region.
Deep Learning Based Multi-Node ISAC 4D Environmental Reconstruction with Uplink- Downlink Cooperation
Apr 23, 2024Utilizing widely distributed communication nodes to achieve environmental reconstruction is one of the significant scenarios for Integrated Sensing and Communication (ISAC) and a crucial technology for 6G. To achieve this crucial functionality, we propose a deep learning based multi-node ISAC 4D environment reconstruction method with Uplink-Downlink (UL-DL) cooperation, which employs virtual aperture technology, Constant False Alarm Rate (CFAR) detection, and Mutiple Signal Classification (MUSIC) algorithm to maximize the sensing capabilities of single sensing nodes. Simultaneously, it introduces a cooperative environmental reconstruction scheme involving multi-node cooperation and Uplink-Downlink (UL-DL) cooperation to overcome the limitations of single-node sensing caused by occlusion and limited viewpoints. Furthermore, the deep learning models Attention Gate Gridding Residual Neural Network (AGGRNN) and Multi-View Sensing Fusion Network (MVSFNet) to enhance the density of sparsely reconstructed point clouds are proposed, aiming to restore as many original environmental details as possible while preserving the spatial structure of the point cloud. Additionally, we propose a multi-level fusion strategy incorporating both data-level and feature-level fusion to fully leverage the advantages of multi-node cooperation. Experimental results demonstrate that the environmental reconstruction performance of this method significantly outperforms other comparative method, enabling high-precision environmental reconstruction using ISAC system.
Deep Cooperation in ISAC System: Resource, Node and Infrastructure Perspectives
Mar 05, 2024
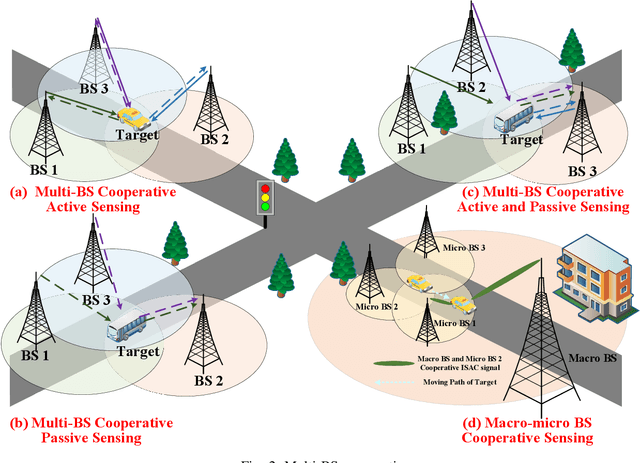
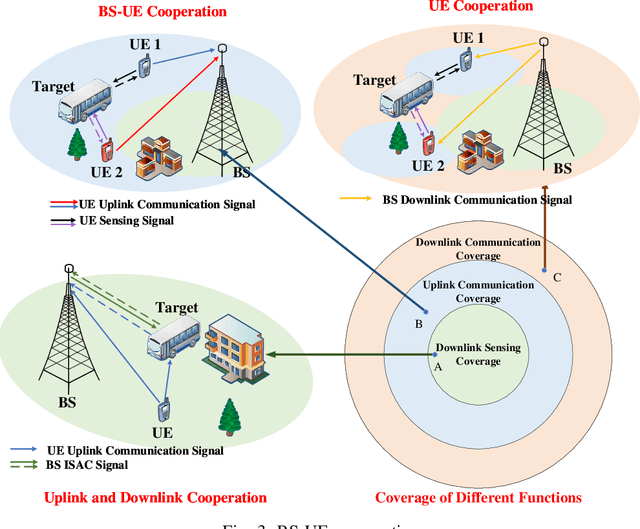
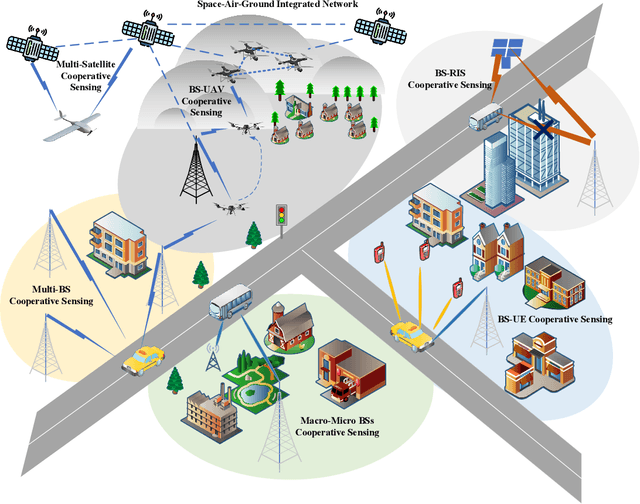
With the mobile communication system evolving into 6th-generation (6G), the Internet of Everything (IoE) is becoming reality, which connects human, big data and intelligent machines to support the intelligent decision making, reconfiguring the traditional industries and human life. The applications of IoE require not only pure communication capability, but also high-accuracy and large-scale sensing capability. With the emerging integrated sensing and communication (ISAC) technique, exploiting the mobile communication system with multi-domain resources, multiple network elements, and large-scale infrastructures to realize cooperative sensing is a crucial approach to satisfy the requirements of high-accuracy and large-scale sensing in IoE. In this article, the deep cooperation in ISAC system including three perspectives is investigated. In the microscopic perspective, namely, within a single node, the cooperation at the resource-level is performed to improve sensing accuracy by fusing the sensing information carried in the time-frequency-space-code multi-domain resources. In the mesoscopic perspective, the sensing accuracy could be improved through the cooperation of multiple nodes including Base Station (BS), User Equipment (UE), and Reconfigurable Intelligence Surface (RIS), etc. In the macroscopic perspective, the massive number of infrastructures from the same operator or different operators could perform cooperative sensing to extend the sensing coverage and improve the sensing continuity. This article may provide a deep and comprehensive view on the cooperative sensing in ISAC system to enhance the performance of sensing, supporting the applications of IoE.
Integrated Sensing and Communication Driven Digital Twin for Intelligent Machine Network
Feb 08, 2024Intelligent machines (IMs), including industrial machines, unmanned aerial vehicles (UAVs), and unmanned vehicles, etc., could perform effective cooperation in complex environment when they form IM network. The efficient environment sensing and communication are crucial for IM network, enabling the real-time and stable control of IMs. With the emergence of integrated sensing and communication (ISAC) technology, IM network is empowered with ubiquitous sensing capabilities, which is helpful in improving the efficiency of communication and sensing with the mutual benefit of them. However, the massive amount of sensing information brings challenges for the processing, storage and application of sensing information. In this article, ISAC driven digital twin (DT) is proposed for IM network, and the architecture and enabling technologies are revealed. ISAC driven DT structurally stores the sensing information, which is further applied to optimize communication, networking and control schemes of IMs, promoting the widespread applications of IMs.
Spectrum Sharing between UAV-based Wireless Mesh Networks and Ground Networks
Nov 25, 2023The unmanned aerial vehicle (UAV)-based wireless mesh networks can economically provide wireless services for the areas with disasters. However, the capacity of air-to-air communications is limited due to the multi-hop transmissions. In this paper, the spectrum sharing between UAV-based wireless mesh networks and ground networks is studied to improve the capacity of the UAV networks. Considering the distribution of UAVs as a three-dimensional (3D) homogeneous Poisson point process (PPP) within a vertical range, the stochastic geometry is applied to analyze the impact of the height of UAVs, the transmit power of UAVs, the density of UAVs and the vertical range, etc., on the coverage probability of ground network user and UAV network user, respectively. The optimal height of UAVs is numerically achieved in maximizing the capacity of UAV networks with the constraint of the coverage probability of ground network user. This paper provides a basic guideline for the deployment of UAV-based wireless mesh networks.
The Performance Analysis of Spectrum Sharing between UAV enabled Wireless Mesh Networks and Ground Networks
Nov 25, 2023Unmanned aerial vehicle (UAV) has the advantages of large coverage and flexibility, which could be applied in disaster management to provide wireless services to the rescuers and victims. When UAVs forms an aerial mesh network, line-of-sight (LoS) air-to-air (A2A) communications have long transmission distance, which extends the coverage of multiple UAVs. However, the capacity of UAV is constrained due to the multiple hop transmissions in aerial mesh networks. In this paper, spectrum sharing between UAV enabled wireless mesh networks and ground networks is studied to improve the capacity of UAV networks. Considering two-dimensional (2D) and three-dimensional (3D) homogeneous Poisson point process (PPP) modeling for the distribution of UAVs within a vertical range {\Delta}h, stochastic geometry is applied to analyze the impact of the height of UAVs, the transmit power of UAVs, the density of UAVs and the vertical range, etc., on the coverage probability of ground network user and UAV network user. Besides, performance improvement of spectrum sharing with directional antenna is verified. With the object function of maximizing the transmission capacity, the optimal altitude of UAVs is obtained. This paper provides a theoretical guideline for the spectrum sharing of UAV enabled wireless mesh networks, which may contribute significant value to the study of spectrum sharing mechanisms for UAV enabled wireless mesh networks.
Capacity and Delay of Unmanned Aerial Vehicle Networks with Mobility
Nov 25, 2023Unmanned aerial vehicles (UAVs) are widely exploited in environment monitoring, search-and-rescue, etc. However, the mobility and short flight duration of UAVs bring challenges for UAV networking. In this paper, we study the UAV networks with n UAVs acting as aerial sensors. UAVs generally have short flight duration and need to frequently get energy replenishment from the control station. Hence the returning UAVs bring the data of the UAVs along the returning paths to the control station with a store-carry-and-forward (SCF) mode. A critical range for the distance between the UAV and the control station is discovered. Within the critical range, the per-node capacity of the SCF mode is O(n/log n) times higher than that of the multi-hop mode. However, the per-node capacity of the SCF mode outside the critical range decreases with the distance between the UAV and the control station. To eliminate the critical range, a mobility control scheme is proposed such that the capacity scaling laws of the SCF mode are the same for all UAVs, which improves the capacity performance of UAV networks. Moreover, the delay of the SCF mode is derived. The impact of the size of the entire region, the velocity of UAVs, the number of UAVs and the flight duration of UAVs on the delay of SCF mode is analyzed. This paper reveals that the mobility and short flight duration of UAVs have beneficial effects on the performance of UAV networks, which may motivate the study of SCF schemes for UAV networks.
Joint Localization and Communication Enhancement in Uplink Integrated Sensing and Communications System with Clock Asynchronism
Oct 28, 2023



In this paper, we propose a joint single-base localization and communication enhancement scheme for the uplink (UL) integrated sensing and communications (ISAC) system with asynchronism, which can achieve accurate single-base localization of user equipment (UE) and significantly improve the communication reliability despite the existence of timing offset (TO) due to the clock asynchronism between UE and base station (BS). Our proposed scheme integrates the CSI enhancement into the multiple signal classification (MUSIC)-based AoA estimation and thus imposes no extra complexity on the ISAC system. We further exploit a MUSIC-based range estimation method and prove that it can suppress the time-varying TO-related phase terms. Exploiting the AoA and range estimation of UE, we can estimate the location of UE. Finally, we propose a joint CSI and data signals-based localization scheme that can coherently exploit the data and the CSI signals to improve the AoA and range estimation, which further enhances the single-base localization of UE. The extensive simulation results show that the enhanced CSI can achieve equivalent bit error rate performance to the minimum mean square error (MMSE) CSI estimator. The proposed joint CSI and data signals-based localization scheme can achieve decimeter-level localization accuracy despite the existing clock asynchronism and improve the localization mean square error (MSE) by about 8 dB compared with the maximum likelihood (ML)-based benchmark method.
Sensing-assisted Accurate and Fast Beam Management for Cellular-connected mmWave UAV Network
Oct 12, 2023



Beam management, including initial access (IA) and beam tracking, is essential to the millimeter-wave Unmanned Aerial Vehicle (UAV) network. However, conventional communication-only and feedback-based schemes suffer a high delay and low accuracy of beam alignment since they only enable the receiver to passively hear the information of the transmitter from the radio domain. This paper presents a novel sensing-assisted beam management approach, the first solution that fully utilizes the information from the visual domain to improve communication performance. We employ both integrated sensing and communication and computer vision techniques and design an extended Kalman filtering method for beam tracking and prediction. Besides, we also propose a novel dual identity association solution to distinguish multiple UAVs in dynamic environments. Real-world experiments and numerical results show that the proposed solution outperforms the conventional methods in IA delay, association accuracy, tracking error, and communication performance.