 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDong Han
Privacy-Preserving Face Recognition in Hybrid Frequency-Color Domain
Jan 24, 2024
Face recognition technology has been deployed in various real-life applications. The most sophisticated deep learning-based face recognition systems rely on training millions of face images through complex deep neural networks to achieve high accuracy. It is quite common for clients to upload face images to the service provider in order to access the model inference. However, the face image is a type of sensitive biometric attribute tied to the identity information of each user. Directly exposing the raw face image to the service provider poses a threat to the user's privacy. Current privacy-preserving approaches to face recognition focus on either concealing visual information on model input or protecting model output face embedding. The noticeable drop in recognition accuracy is a pitfall for most methods. This paper proposes a hybrid frequency-color fusion approach to reduce the input dimensionality of face recognition in the frequency domain. Moreover, sparse color information is also introduced to alleviate significant accuracy degradation after adding differential privacy noise. Besides, an identity-specific embedding mapping scheme is applied to protect original face embedding by enlarging the distance among identities. Lastly, secure multiparty computation is implemented for safely computing the embedding distance during model inference. The proposed method performs well on multiple widely used verification datasets. Moreover, it has around 2.6% to 4.2% higher accuracy than the state-of-the-art in the 1:N verification scenario.
Hercules: An Autonomous Logistic Vehicle for Contact-less Goods Transportation During the COVID-19 Outbreak
Apr 16, 2020
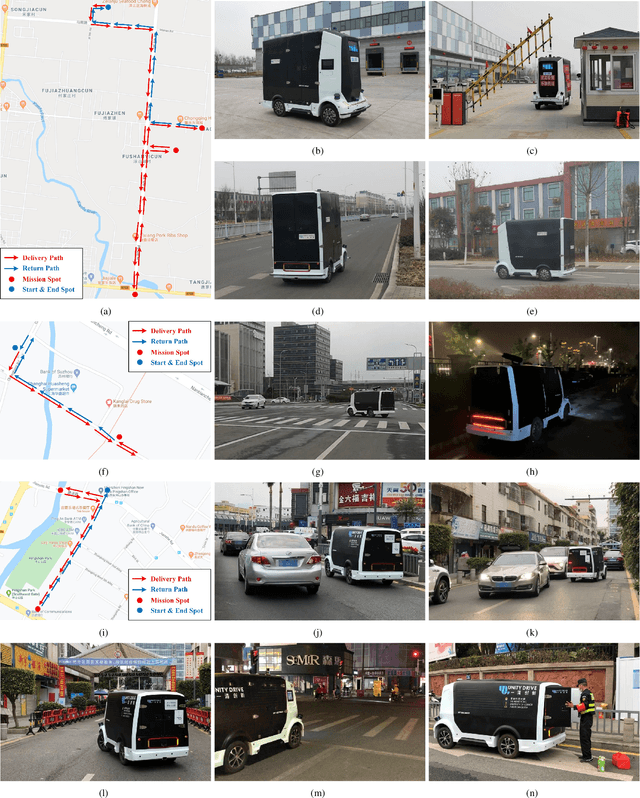
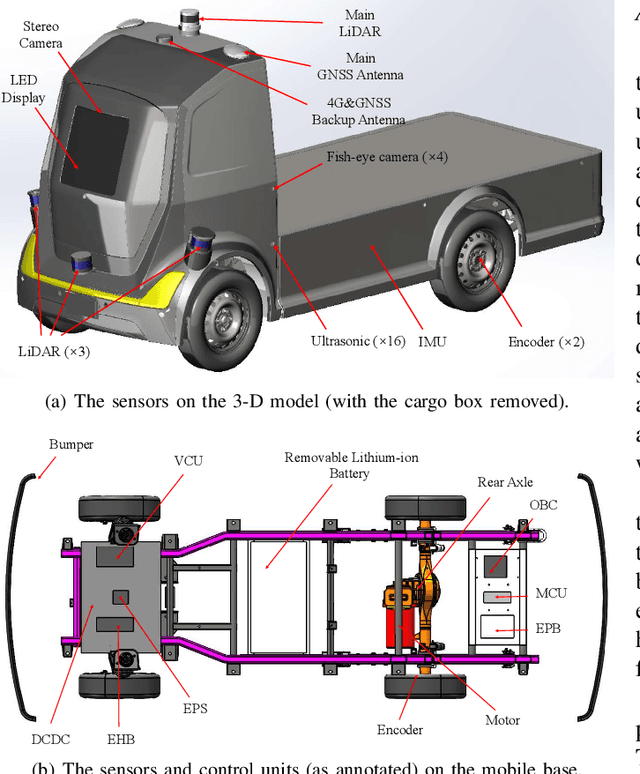
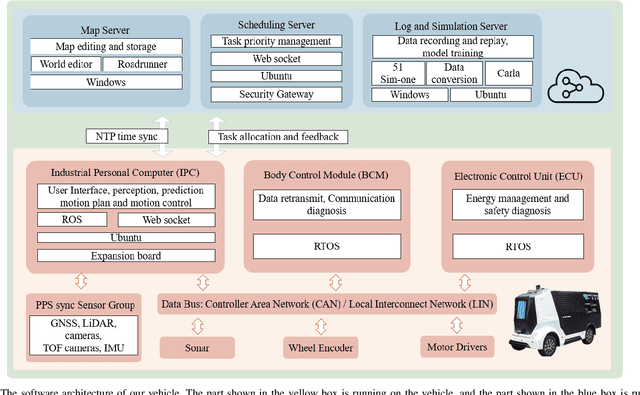
Since December 2019, the coronavirus disease 2019 (COVID-19) has spread rapidly across China. As at the date of writing this article, the disease has been globally reported in 100 countries, infected over 100,000 people and caused over 3,000 deaths. Avoiding person-to-person transmission is an effective approach to control and prevent the epidemic. However, many daily activities, such as logistics transporting goods in our daily life, inevitably involve person-to-person contact. To achieve contact-less goods transportation, using an autonomous logistic vehicle has become the preferred choice. This article presents Hercules, an autonomous logistic vehicle used for contact-less goods transportation during the outbreak of COVID-19. The vehicle is designed with autonomous navigation capability. We provide details on the hardware and software, as well as the algorithms to achieve autonomous navigation including perception, planning and control. This paper is accompanied by a demonstration video and a dataset, which are available here: https://sites.google.com/view/contact-less-transportation.
A Robust Stereo Camera Localization Method with Prior LiDAR Map Constrains
Dec 02, 2019



In complex environments, low-cost and robust localization is a challenging problem. For example, in a GPSdenied environment, LiDAR can provide accurate position information, but the cost is high. In general, visual SLAM based localization methods become unreliable when the sunlight changes greatly. Therefore, inexpensive and reliable methods are required. In this paper, we propose a stereo visual localization method based on the prior LiDAR map. Different from the conventional visual localization system, we design a novel visual optimization model by matching planar information between the LiDAR map and visual image. Bundle adjustment is built by using coplanarity constraints. To solve the optimization problem, we use a graph-based optimization algorithm and a local window optimization method. Finally, we estimate a full six degrees of freedom (DOF) pose without scale drift. To validate the efficiency, the proposed method has been tested on the KITTI dataset. The results show that our method is more robust and accurate than the state-of-art ORB-SLAM2.
Road Curb Detection Using A Novel Tensor Voting Algorithm
Nov 29, 2019



Road curb detection is very important and necessary for autonomous driving because it can improve the safety and robustness of robot navigation in the outdoor environment. In this paper, a novel road curb detection method based on tensor voting is presented. The proposed method processes the dense point cloud acquired using a 3D LiDAR. Firstly, we utilize a sparse tensor voting approach to extract the line and surface features. Then, we use an adaptive height threshold and a surface vector to extract the point clouds of the road curbs. Finally, we utilize the height threshold to segment different obstacles from the occupancy grid map. This also provides an effective way of generating high-definition maps. The experimental results illustrate that our proposed algorithm can detect road curbs with near real-time performance.
Automatic Calibration of Dual-LiDARs Using Two Poles Stickered with Retro-Reflective Tape
Nov 02, 2019



Multi-LiDAR systems have been prevalently applied in modern autonomous vehicles to render a broad view of the environments. The rapid development of 5G wireless technologies has brought a breakthrough for current cellular vehicle-to-everything (C-V2X) applications. Therefore, a novel localization and perception system in which multiple LiDARs are mounted around cities for autonomous vehicles has been proposed. However, the existing calibration methods require specific hard-to-move markers, ego-motion, or good initial values given by users. In this paper, we present a novel approach that enables automatic multi-LiDAR calibration using two poles stickered with retro-reflective tape. This method does not depend on prior environmental information, initial values of the extrinsic parameters, or movable platforms like a car. We analyze the LiDAR-pole model, verify the feasibility of the algorithm through simulation data, and present a simple method to measure the calibration errors w.r.t the ground truth. Experimental results demonstrate that our approach gains better flexibility and higher accuracy when compared with the state-of-the-art approach.
Multi-distance Support Matrix Machines
Jul 02, 2018



Real-world data such as digital images, MRI scans and electroencephalography signals are naturally represented as matrices with structural information. Most existing classifiers aim to capture these structures by regularizing the regression matrix to be low-rank or sparse. Some other methodologies introduce factorization technique to explore nonlinear relationships of matrix data in kernel space. In this paper, we propose a multi-distance support matrix machine (MDSMM), which provides a principled way of solving matrix classification problems. The multi-distance is introduced to capture the correlation within matrix data, by means of intrinsic information in rows and columns of input data. A complex hyperplane is established upon these values to separate distinct classes. We further study the generalization bounds for i.i.d. processes and non i.i.d. process based on both SVM and SMM classifiers. For typical hypothesis classes where matrix norms are constrained, MDSMM achieves a faster learning rate than traditional classifiers. We also provide a more general approach for samples without prior knowledge. We demonstrate the merits of the proposed method by conducting exhaustive experiments on both simulation study and a number of real-word datasets.