 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHugo Touvron
Code Llama: Open Foundation Models for Code
Aug 25, 2023
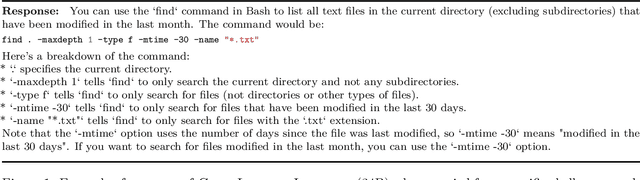
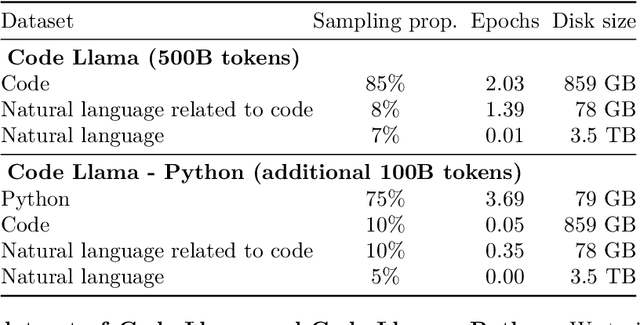
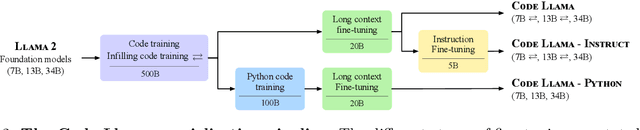
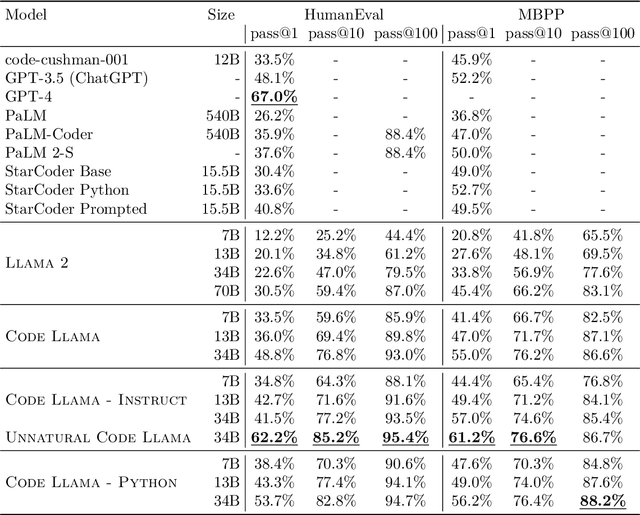
We release Code Llama, a family of large language models for code based on Llama 2 providing state-of-the-art performance among open models, infilling capabilities, support for large input contexts, and zero-shot instruction following ability for programming tasks. We provide multiple flavors to cover a wide range of applications: foundation models (Code Llama), Python specializations (Code Llama - Python), and instruction-following models (Code Llama - Instruct) with 7B, 13B and 34B parameters each. All models are trained on sequences of 16k tokens and show improvements on inputs with up to 100k tokens. 7B and 13B Code Llama and Code Llama - Instruct variants support infilling based on surrounding content. Code Llama reaches state-of-the-art performance among open models on several code benchmarks, with scores of up to 53% and 55% on HumanEval and MBPP, respectively. Notably, Code Llama - Python 7B outperforms Llama 2 70B on HumanEval and MBPP, and all our models outperform every other publicly available model on MultiPL-E. We release Code Llama under a permissive license that allows for both research and commercial use.
Llama 2: Open Foundation and Fine-Tuned Chat Models
Jul 19, 2023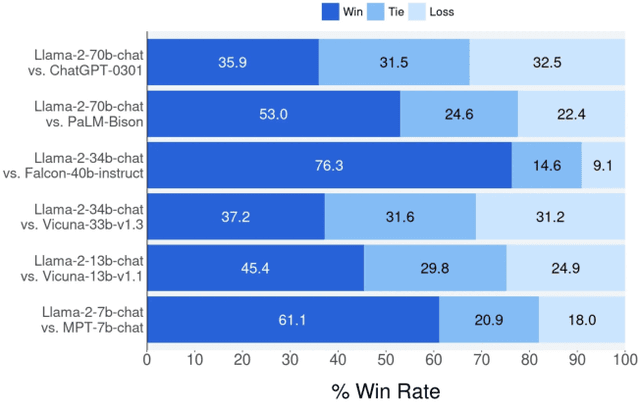
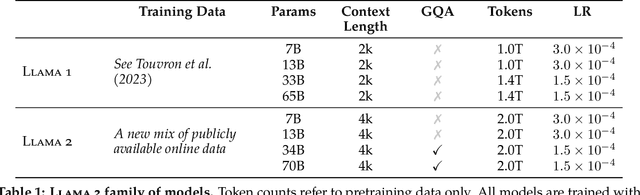
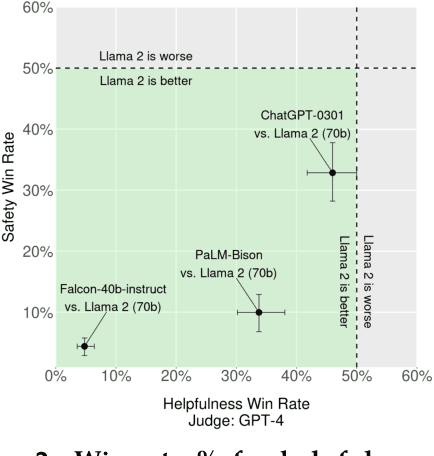
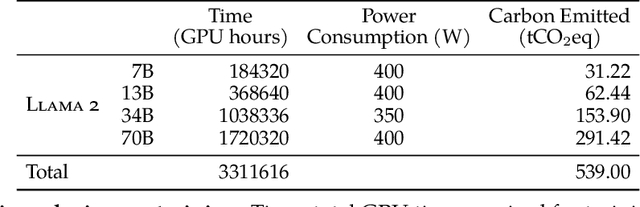
In this work, we develop and release Llama 2, a collection of pretrained and fine-tuned large language models (LLMs) ranging in scale from 7 billion to 70 billion parameters. Our fine-tuned LLMs, called Llama 2-Chat, are optimized for dialogue use cases. Our models outperform open-source chat models on most benchmarks we tested, and based on our human evaluations for helpfulness and safety, may be a suitable substitute for closed-source models. We provide a detailed description of our approach to fine-tuning and safety improvements of Llama 2-Chat in order to enable the community to build on our work and contribute to the responsible development of LLMs.
LLaMA: Open and Efficient Foundation Language Models
Feb 27, 2023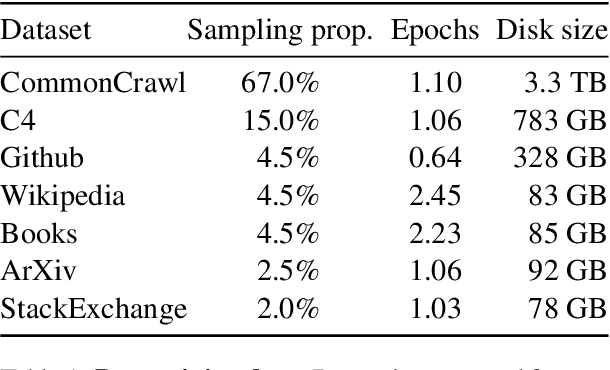
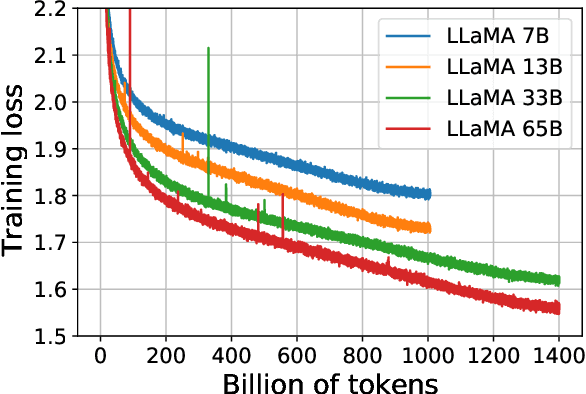
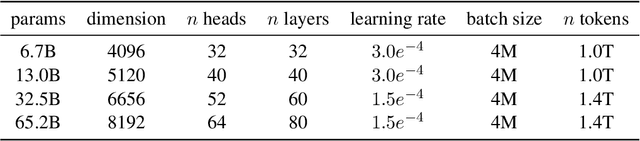
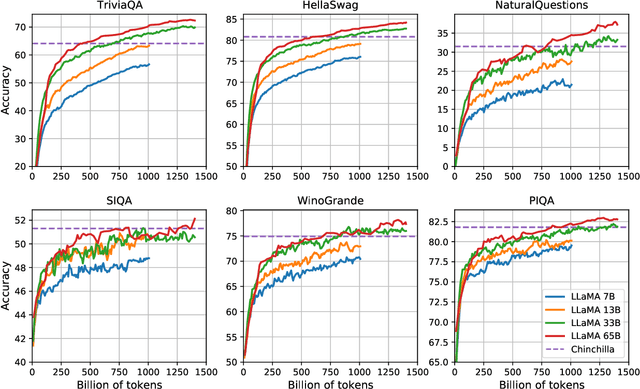
We introduce LLaMA, a collection of foundation language models ranging from 7B to 65B parameters. We train our models on trillions of tokens, and show that it is possible to train state-of-the-art models using publicly available datasets exclusively, without resorting to proprietary and inaccessible datasets. In particular, LLaMA-13B outperforms GPT-3 (175B) on most benchmarks, and LLaMA-65B is competitive with the best models, Chinchilla-70B and PaLM-540B. We release all our models to the research community.
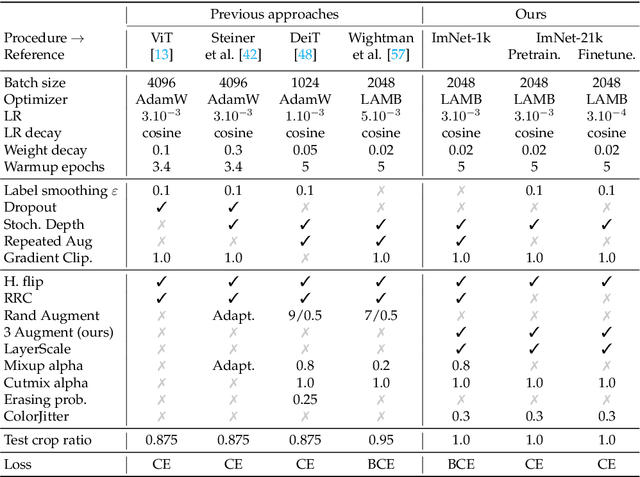
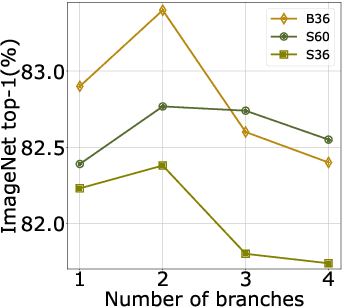
Co-training $2^L$ Submodels for Visual Recognition
Dec 09, 2022
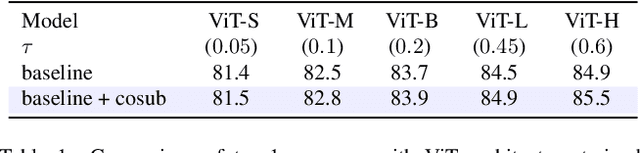
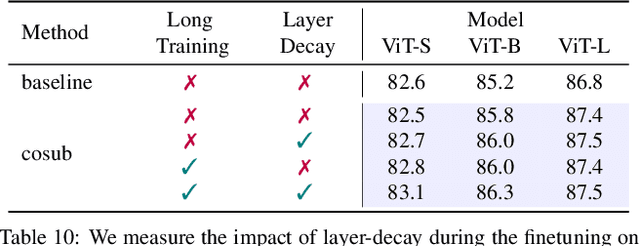
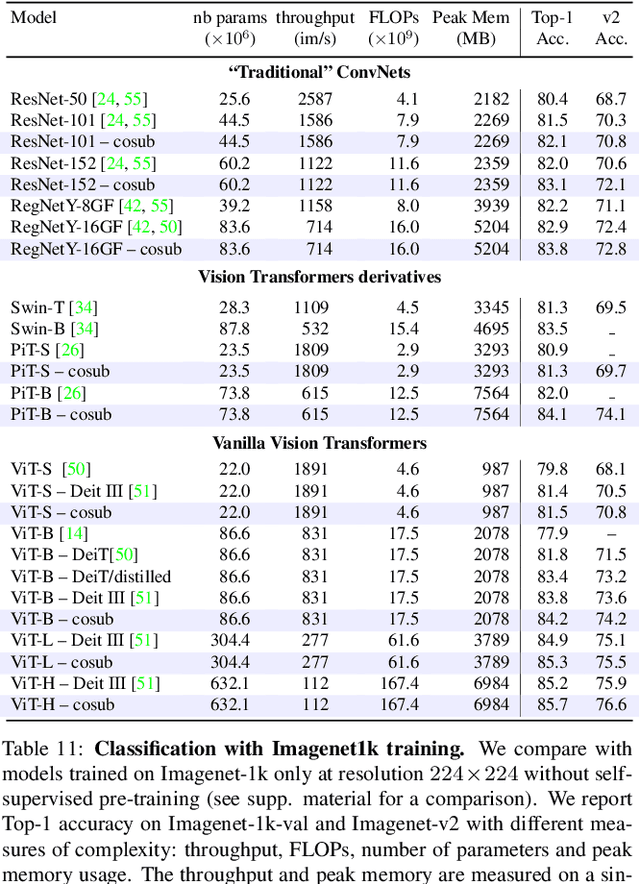
We introduce submodel co-training, a regularization method related to co-training, self-distillation and stochastic depth. Given a neural network to be trained, for each sample we implicitly instantiate two altered networks, ``submodels'', with stochastic depth: we activate only a subset of the layers. Each network serves as a soft teacher to the other, by providing a loss that complements the regular loss provided by the one-hot label. Our approach, dubbed cosub, uses a single set of weights, and does not involve a pre-trained external model or temporal averaging. Experimentally, we show that submodel co-training is effective to train backbones for recognition tasks such as image classification and semantic segmentation. Our approach is compatible with multiple architectures, including RegNet, ViT, PiT, XCiT, Swin and ConvNext. Our training strategy improves their results in comparable settings. For instance, a ViT-B pretrained with cosub on ImageNet-21k obtains 87.4% top-1 acc. @448 on ImageNet-val.
DeiT III: Revenge of the ViT
Apr 14, 2022

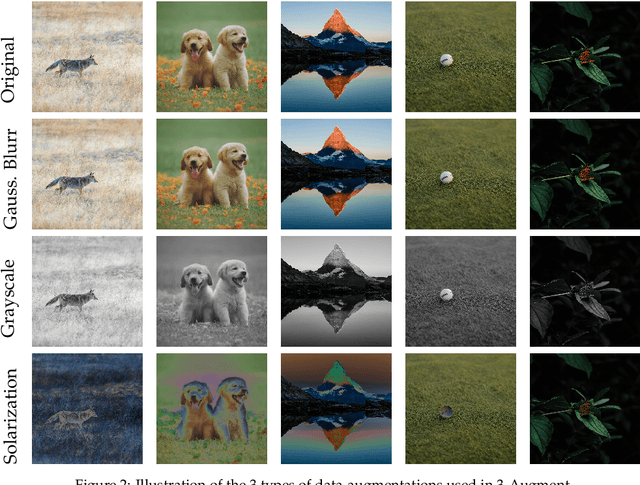
A Vision Transformer (ViT) is a simple neural architecture amenable to serve several computer vision tasks. It has limited built-in architectural priors, in contrast to more recent architectures that incorporate priors either about the input data or of specific tasks. Recent works show that ViTs benefit from self-supervised pre-training, in particular BerT-like pre-training like BeiT. In this paper, we revisit the supervised training of ViTs. Our procedure builds upon and simplifies a recipe introduced for training ResNet-50. It includes a new simple data-augmentation procedure with only 3 augmentations, closer to the practice in self-supervised learning. Our evaluations on Image classification (ImageNet-1k with and without pre-training on ImageNet-21k), transfer learning and semantic segmentation show that our procedure outperforms by a large margin previous fully supervised training recipes for ViT. It also reveals that the performance of our ViT trained with supervision is comparable to that of more recent architectures. Our results could serve as better baselines for recent self-supervised approaches demonstrated on ViT.
Three things everyone should know about Vision Transformers
Mar 18, 2022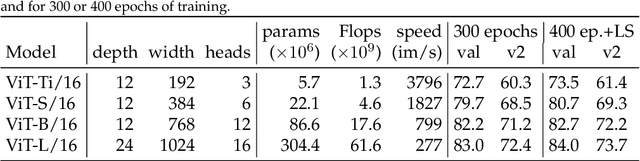
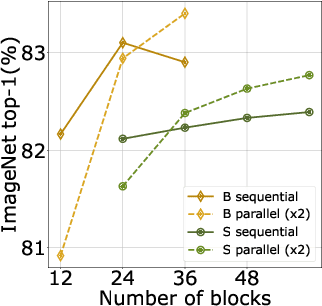
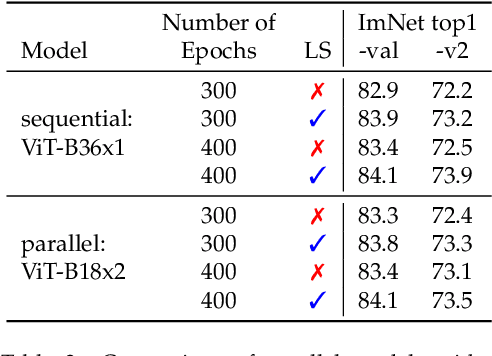
After their initial success in natural language processing, transformer architectures have rapidly gained traction in computer vision, providing state-of-the-art results for tasks such as image classification, detection, segmentation, and video analysis. We offer three insights based on simple and easy to implement variants of vision transformers. (1) The residual layers of vision transformers, which are usually processed sequentially, can to some extent be processed efficiently in parallel without noticeably affecting the accuracy. (2) Fine-tuning the weights of the attention layers is sufficient to adapt vision transformers to a higher resolution and to other classification tasks. This saves compute, reduces the peak memory consumption at fine-tuning time, and allows sharing the majority of weights across tasks. (3) Adding MLP-based patch pre-processing layers improves Bert-like self-supervised training based on patch masking. We evaluate the impact of these design choices using the ImageNet-1k dataset, and confirm our findings on the ImageNet-v2 test set. Transfer performance is measured across six smaller datasets.
Augmenting Convolutional networks with attention-based aggregation
Dec 27, 2021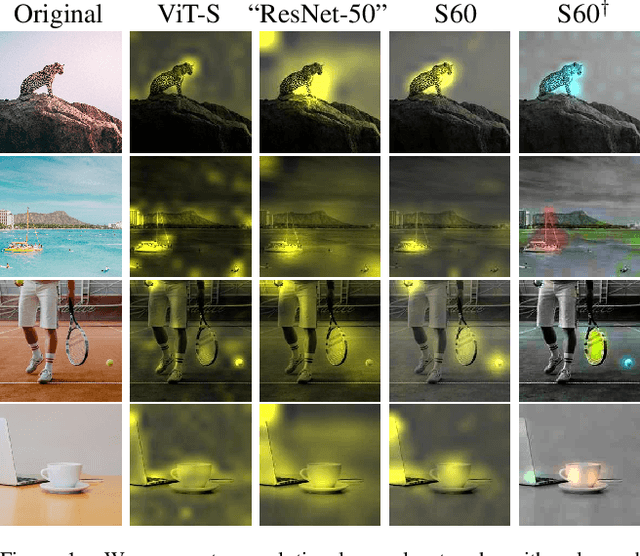
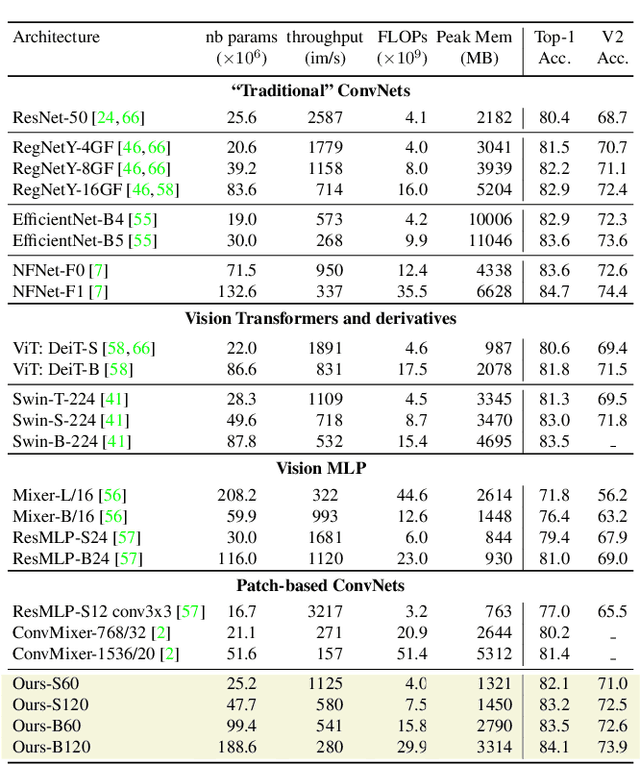
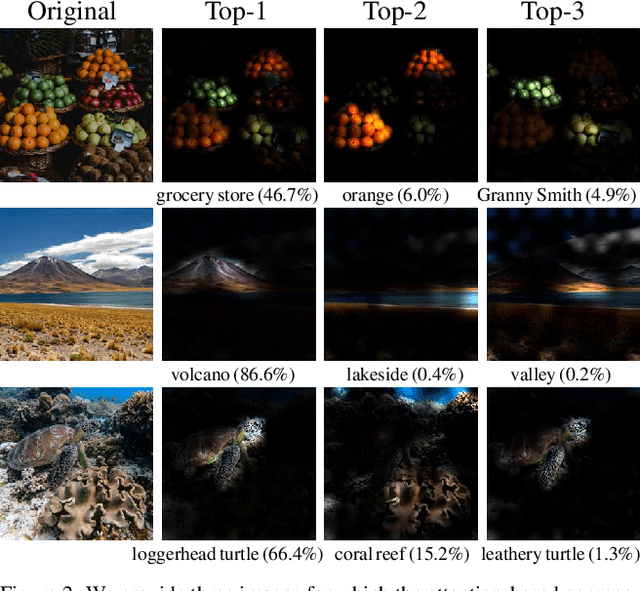
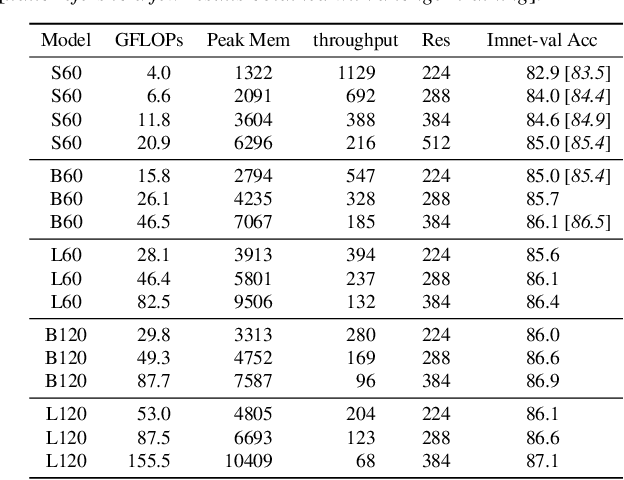
We show how to augment any convolutional network with an attention-based global map to achieve non-local reasoning. We replace the final average pooling by an attention-based aggregation layer akin to a single transformer block, that weights how the patches are involved in the classification decision. We plug this learned aggregation layer with a simplistic patch-based convolutional network parametrized by 2 parameters (width and depth). In contrast with a pyramidal design, this architecture family maintains the input patch resolution across all the layers. It yields surprisingly competitive trade-offs between accuracy and complexity, in particular in terms of memory consumption, as shown by our experiments on various computer vision tasks: object classification, image segmentation and detection.
Are Large-scale Datasets Necessary for Self-Supervised Pre-training?
Dec 20, 2021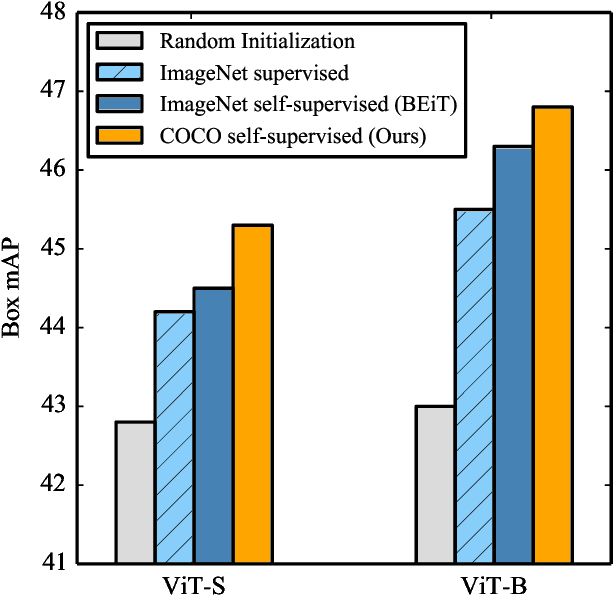
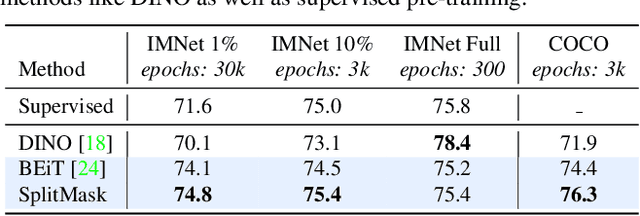
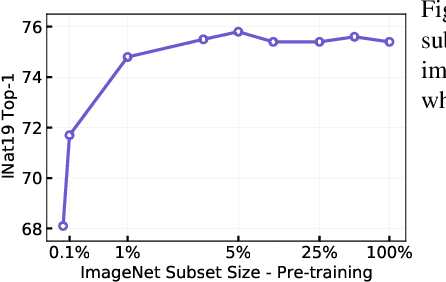

Pre-training models on large scale datasets, like ImageNet, is a standard practice in computer vision. This paradigm is especially effective for tasks with small training sets, for which high-capacity models tend to overfit. In this work, we consider a self-supervised pre-training scenario that only leverages the target task data. We consider datasets, like Stanford Cars, Sketch or COCO, which are order(s) of magnitude smaller than Imagenet. Our study shows that denoising autoencoders, such as BEiT or a variant that we introduce in this paper, are more robust to the type and size of the pre-training data than popular self-supervised methods trained by comparing image embeddings.We obtain competitive performance compared to ImageNet pre-training on a variety of classification datasets, from different domains. On COCO, when pre-training solely using COCO images, the detection and instance segmentation performance surpasses the supervised ImageNet pre-training in a comparable setting.
ResNet strikes back: An improved training procedure in timm
Oct 01, 2021



The influential Residual Networks designed by He et al. remain the gold-standard architecture in numerous scientific publications. They typically serve as the default architecture in studies, or as baselines when new architectures are proposed. Yet there has been significant progress on best practices for training neural networks since the inception of the ResNet architecture in 2015. Novel optimization & data-augmentation have increased the effectiveness of the training recipes. In this paper, we re-evaluate the performance of the vanilla ResNet-50 when trained with a procedure that integrates such advances. We share competitive training settings and pre-trained models in the timm open-source library, with the hope that they will serve as better baselines for future work. For instance, with our more demanding training setting, a vanilla ResNet-50 reaches 80.4% top-1 accuracy at resolution 224x224 on ImageNet-val without extra data or distillation. We also report the performance achieved with popular models with our training procedure.
XCiT: Cross-Covariance Image Transformers
Jun 18, 2021



Following their success in natural language processing, transformers have recently shown much promise for computer vision. The self-attention operation underlying transformers yields global interactions between all tokens ,i.e. words or image patches, and enables flexible modelling of image data beyond the local interactions of convolutions. This flexibility, however, comes with a quadratic complexity in time and memory, hindering application to long sequences and high-resolution images. We propose a "transposed" version of self-attention that operates across feature channels rather than tokens, where the interactions are based on the cross-covariance matrix between keys and queries. The resulting cross-covariance attention (XCA) has linear complexity in the number of tokens, and allows efficient processing of high-resolution images. Our cross-covariance image transformer (XCiT) is built upon XCA. It combines the accuracy of conventional transformers with the scalability of convolutional architectures. We validate the effectiveness and generality of XCiT by reporting excellent results on multiple vision benchmarks, including image classification and self-supervised feature learning on ImageNet-1k, object detection and instance segmentation on COCO, and semantic segmentation on ADE20k.