 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJie Peng
Tuning-Free Accountable Intervention for LLM Deployment -- A Metacognitive Approach
Mar 08, 2024

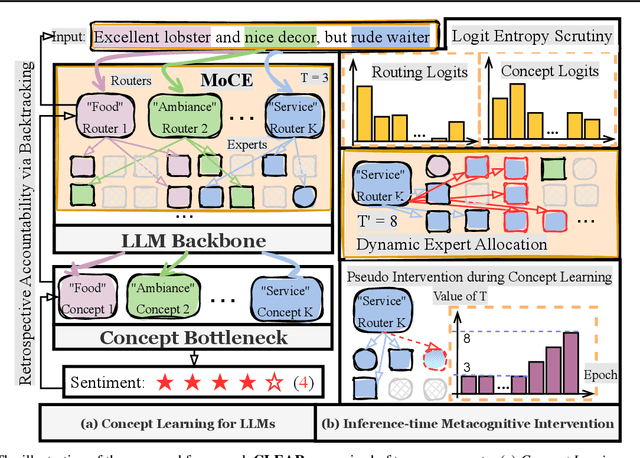
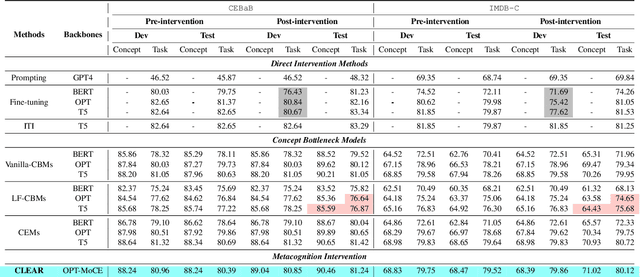
Large Language Models (LLMs) have catalyzed transformative advances across a spectrum of natural language processing tasks through few-shot or zero-shot prompting, bypassing the need for parameter tuning. While convenient, this modus operandi aggravates ``hallucination'' concerns, particularly given the enigmatic ``black-box'' nature behind their gigantic model sizes. Such concerns are exacerbated in high-stakes applications (e.g., healthcare), where unaccountable decision errors can lead to devastating consequences. In contrast, human decision-making relies on nuanced cognitive processes, such as the ability to sense and adaptively correct misjudgments through conceptual understanding. Drawing inspiration from human cognition, we propose an innovative \textit{metacognitive} approach, dubbed \textbf{CLEAR}, to equip LLMs with capabilities for self-aware error identification and correction. Our framework facilitates the construction of concept-specific sparse subnetworks that illuminate transparent decision pathways. This provides a novel interface for model \textit{intervention} after deployment. Our intervention offers compelling advantages: (\textit{i})~at deployment or inference time, our metacognitive LLMs can self-consciously identify potential mispredictions with minimum human involvement, (\textit{ii})~the model has the capability to self-correct its errors efficiently, obviating the need for additional tuning, and (\textit{iii})~the rectification procedure is not only self-explanatory but also user-friendly, enhancing the interpretability and accessibility of the model. By integrating these metacognitive features, our approach pioneers a new path toward engendering greater trustworthiness and accountability in the deployment of LLMs.
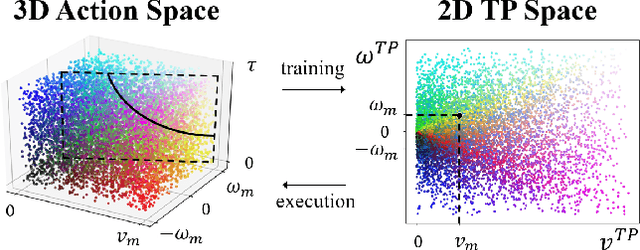
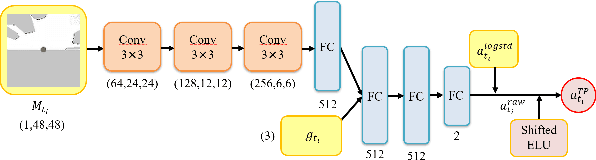
PathRL: An End-to-End Path Generation Method for Collision Avoidance via Deep Reinforcement Learning
Oct 20, 2023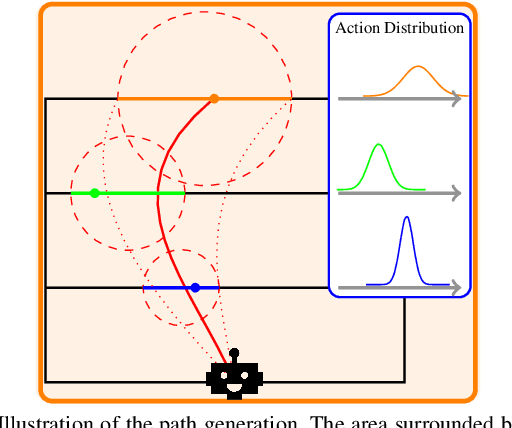
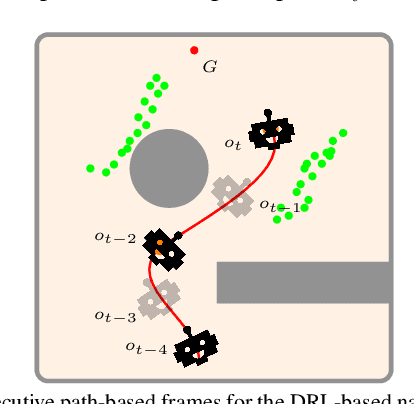
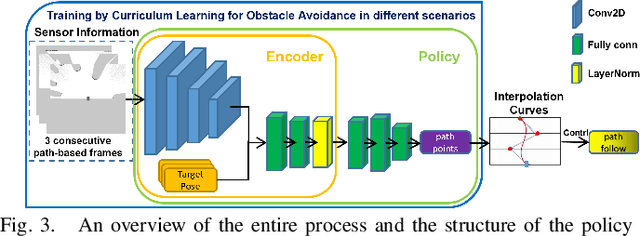
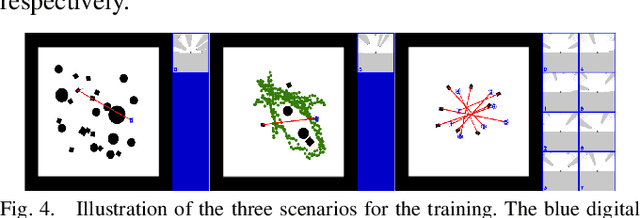
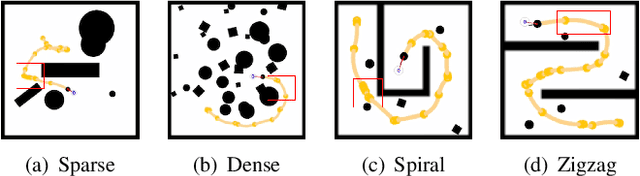
Robot navigation using deep reinforcement learning (DRL) has shown great potential in improving the performance of mobile robots. Nevertheless, most existing DRL-based navigation methods primarily focus on training a policy that directly commands the robot with low-level controls, like linear and angular velocities, which leads to unstable speeds and unsmooth trajectories of the robot during the long-term execution. An alternative method is to train a DRL policy that outputs the navigation path directly. However, two roadblocks arise for training a DRL policy that outputs paths: (1) The action space for potential paths often involves higher dimensions comparing to low-level commands, which increases the difficulties of training; (2) It takes multiple time steps to track a path instead of a single time step, which requires the path to predicate the interactions of the robot w.r.t. the dynamic environment in multiple time steps. This, in turn, amplifies the challenges associated with training. In response to these challenges, we propose PathRL, a novel DRL method that trains the policy to generate the navigation path for the robot. Specifically, we employ specific action space discretization techniques and tailored state space representation methods to address the associated challenges. In our experiments, PathRL achieves better success rates and reduces angular rotation variability compared to other DRL navigation methods, facilitating stable and smooth robot movement. We demonstrate the competitive edge of PathRL in both real-world scenarios and multiple challenging simulation environments.
Byzantine-Robust Decentralized Stochastic Optimization with Stochastic Gradient Noise-Independent Learning Error
Aug 10, 2023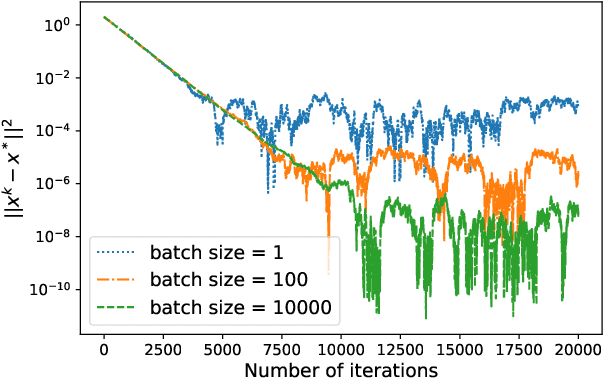
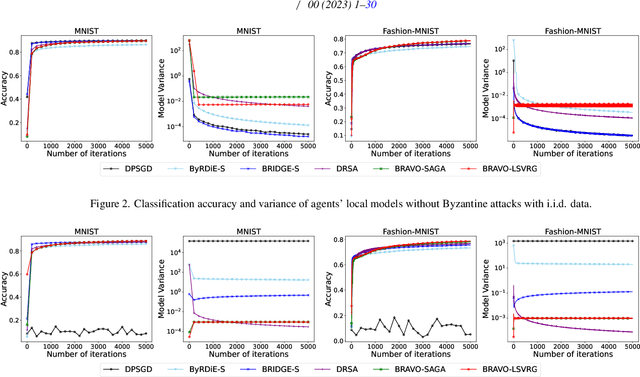
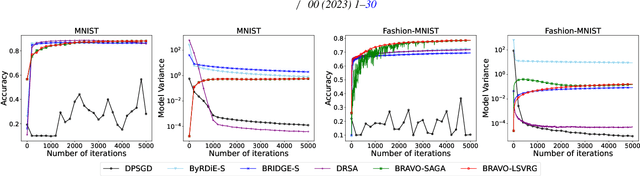
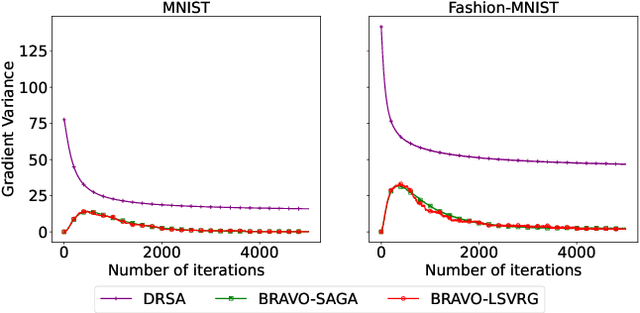
This paper studies Byzantine-robust stochastic optimization over a decentralized network, where every agent periodically communicates with its neighbors to exchange local models, and then updates its own local model by stochastic gradient descent (SGD). The performance of such a method is affected by an unknown number of Byzantine agents, which conduct adversarially during the optimization process. To the best of our knowledge, there is no existing work that simultaneously achieves a linear convergence speed and a small learning error. We observe that the learning error is largely dependent on the intrinsic stochastic gradient noise. Motivated by this observation, we introduce two variance reduction methods, stochastic average gradient algorithm (SAGA) and loopless stochastic variance-reduced gradient (LSVRG), to Byzantine-robust decentralized stochastic optimization for eliminating the negative effect of the stochastic gradient noise. The two resulting methods, BRAVO-SAGA and BRAVO-LSVRG, enjoy both linear convergence speeds and stochastic gradient noise-independent learning errors. Such learning errors are optimal for a class of methods based on total variation (TV)-norm regularization and stochastic subgradient update. We conduct extensive numerical experiments to demonstrate their effectiveness under various Byzantine attacks.
$P^{3}O$: Transferring Visual Representations for Reinforcement Learning via Prompting
Mar 27, 2023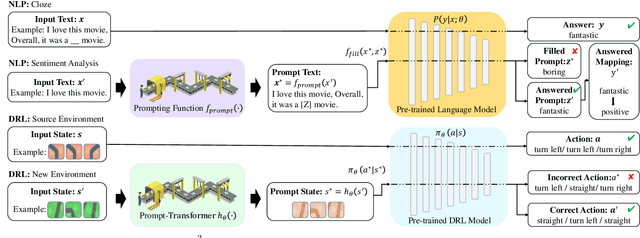
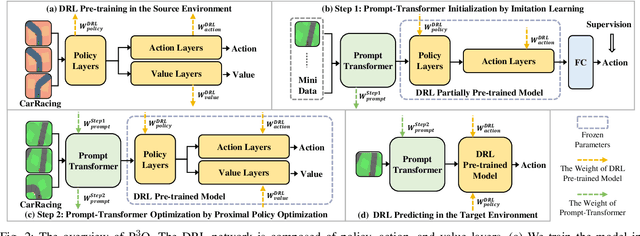
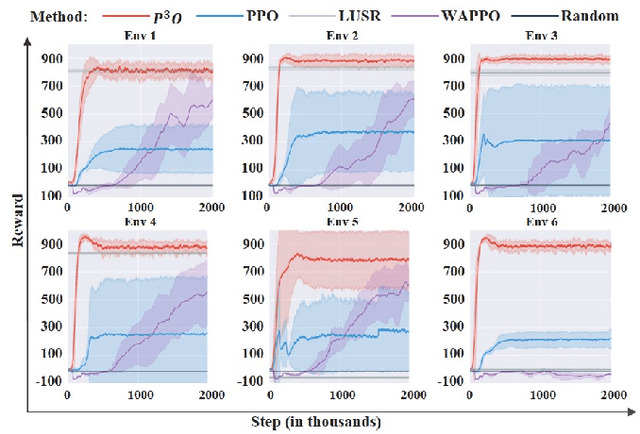
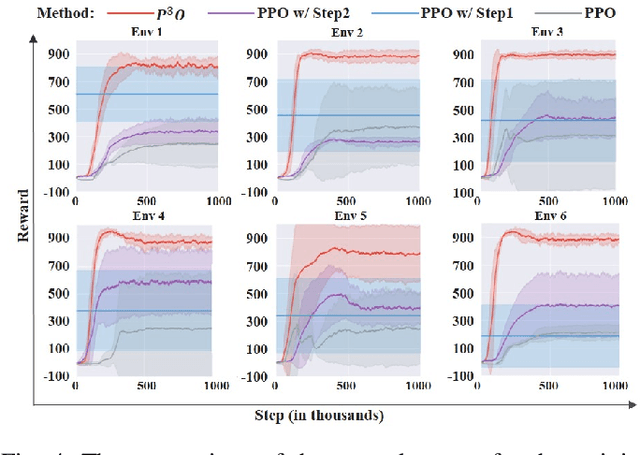
It is important for deep reinforcement learning (DRL) algorithms to transfer their learned policies to new environments that have different visual inputs. In this paper, we introduce Prompt based Proximal Policy Optimization ($P^{3}O$), a three-stage DRL algorithm that transfers visual representations from a target to a source environment by applying prompting. The process of $P^{3}O$ consists of three stages: pre-training, prompting, and predicting. In particular, we specify a prompt-transformer for representation conversion and propose a two-step training process to train the prompt-transformer for the target environment, while the rest of the DRL pipeline remains unchanged. We implement $P^{3}O$ and evaluate it on the OpenAI CarRacing video game. The experimental results show that $P^{3}O$ outperforms the state-of-the-art visual transferring schemes. In particular, $P^{3}O$ allows the learned policies to perform well in environments with different visual inputs, which is much more effective than retraining the policies in these environments.
Deep Reinforcement Learning for Localizability-Enhanced Navigation in Dynamic Human Environments
Mar 22, 2023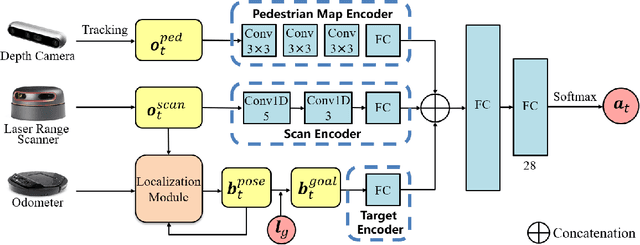

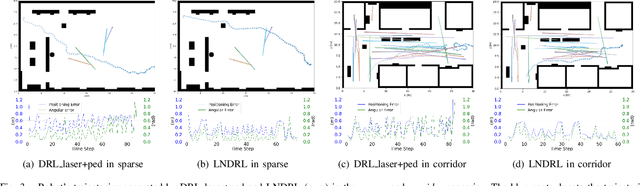
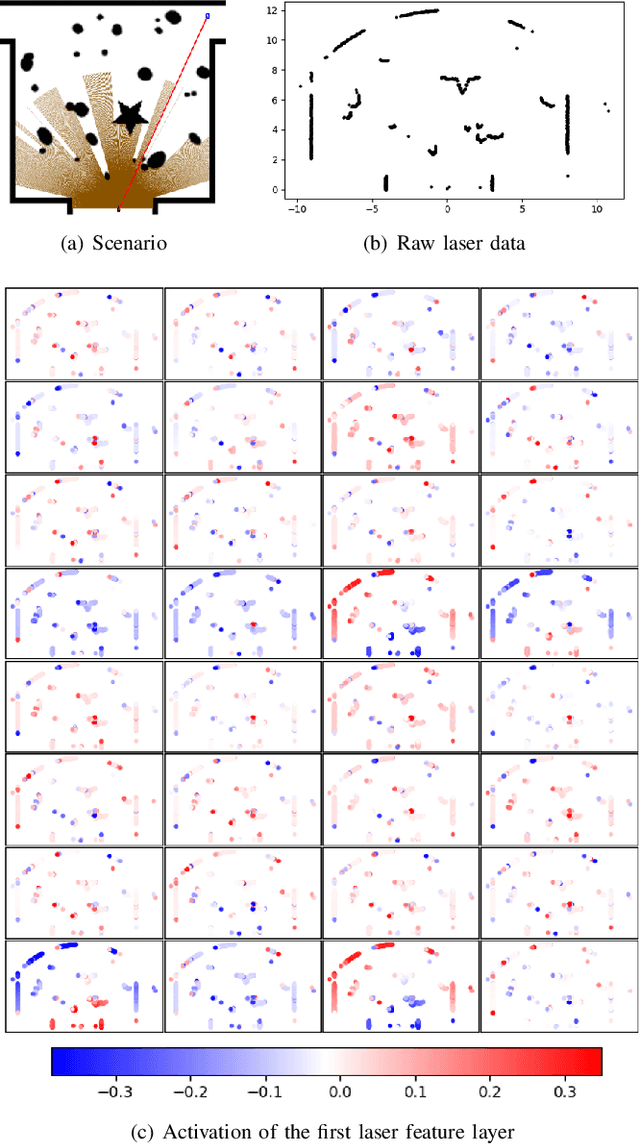
Reliable localization is crucial for autonomous robots to navigate efficiently and safely. Some navigation methods can plan paths with high localizability (which describes the capability of acquiring reliable localization). By following these paths, the robot can access the sensor streams that facilitate more accurate location estimation results by the localization algorithms. However, most of these methods require prior knowledge and struggle to adapt to unseen scenarios or dynamic changes. To overcome these limitations, we propose a novel approach for localizability-enhanced navigation via deep reinforcement learning in dynamic human environments. Our proposed planner automatically extracts geometric features from 2D laser data that are helpful for localization. The planner learns to assign different importance to the geometric features and encourages the robot to navigate through areas that are helpful for laser localization. To facilitate the learning of the planner, we suggest two techniques: (1) an augmented state representation that considers the dynamic changes and the confidence of the localization results, which provides more information and allows the robot to make better decisions, (2) a reward metric that is capable to offer both sparse and dense feedback on behaviors that affect localization accuracy. Our method exhibits significant improvements in lost rate and arrival rate when tested in previously unseen environments.
TLP: A Deep Learning-based Cost Model for Tensor Program Tuning
Nov 22, 2022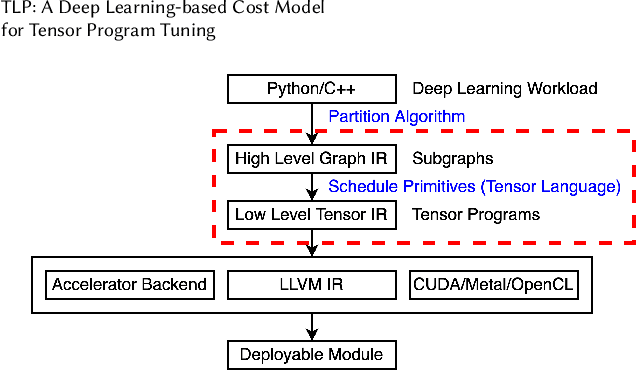
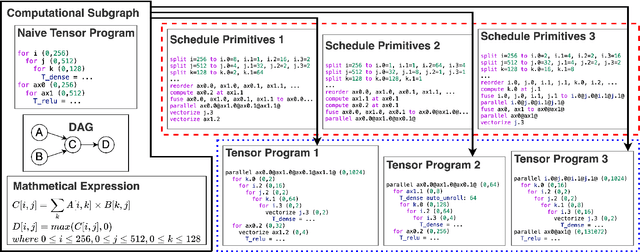
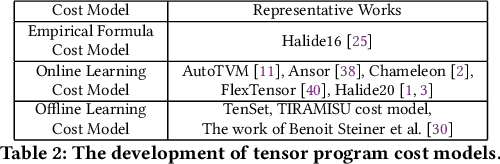
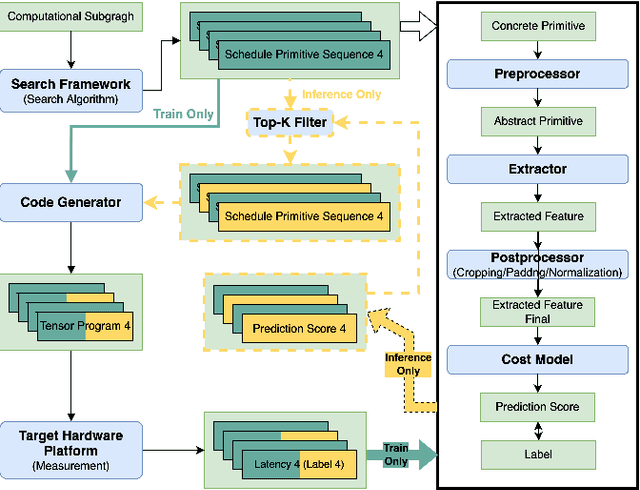
Tensor program tuning is a non-convex objective optimization problem, to which search-based approaches have proven to be effective. At the core of the search-based approaches lies the design of the cost model. Though deep learning-based cost models perform significantly better than other methods, they still fall short and suffer from the following problems. First, their feature extraction heavily relies on expert-level domain knowledge in hardware architectures. Even so, the extracted features are often unsatisfactory and require separate considerations for CPUs and GPUs. Second, a cost model trained on one hardware platform usually performs poorly on another, a problem we call cross-hardware unavailability. In order to address these problems, we propose TLP and MTLTLP. TLP is a deep learning-based cost model that facilitates tensor program tuning. Instead of extracting features from the tensor program itself, TLP extracts features from the schedule primitives. We treat schedule primitives as tensor languages. TLP is thus a Tensor Language Processing task. In this way, the task of predicting the tensor program latency through the cost model is transformed into a natural language processing (NLP) regression task. MTL-TLP combines Multi-Task Learning and TLP to cope with the cross-hardware unavailability problem. We incorporate these techniques into the Ansor framework and conduct detailed experiments. Results show that TLP can speed up the average search time by 9.1X and 3.0X on CPU and GPU workloads, respectively, compared to the state-of-the-art implementation. MTL-TLP can achieve a speed-up of 4.7X and 2.9X on CPU and GPU workloads, respectively, using only 7% of the target hardware data.
PFilter: Building Persistent Maps through Feature Filtering for Fast and Accurate LiDAR-based SLAM
Aug 31, 2022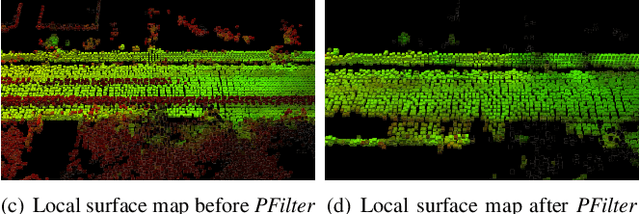
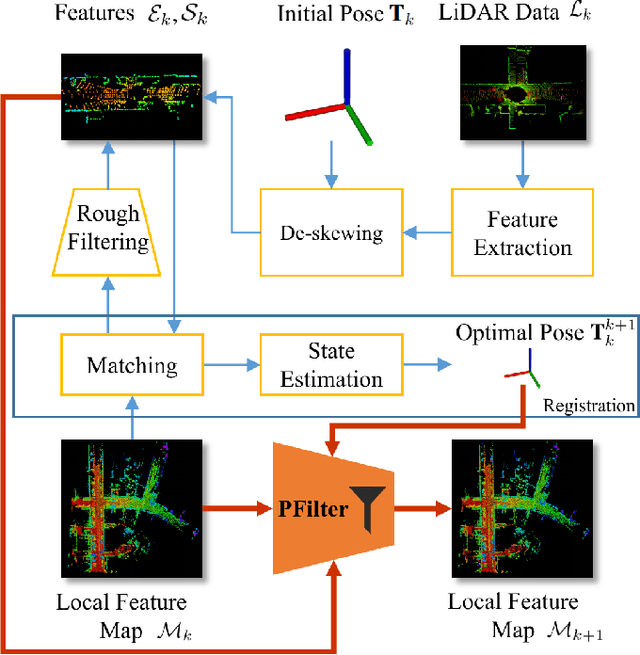
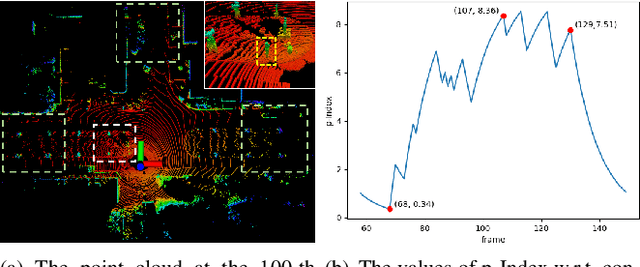
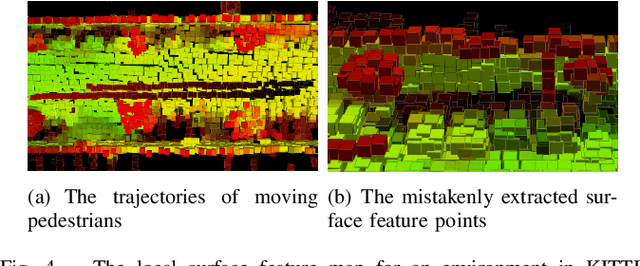
Simultaneous localization and mapping (SLAM) based on laser sensors has been widely adopted by mobile robots and autonomous vehicles. These SLAM systems are required to support accurate localization with limited computational resources. In particular, point cloud registration, i.e., the process of matching and aligning multiple LiDAR scans collected at multiple locations in a global coordinate framework, has been deemed as the bottleneck step in SLAM. In this paper, we propose a feature filtering algorithm, PFilter, that can filter out invalid features and can thus greatly alleviate this bottleneck. Meanwhile, the overall registration accuracy is also improved due to the carefully curated feature points. We integrate PFilter into the well-established scan-to-map LiDAR odometry framework, F-LOAM, and evaluate its performance on the KITTI dataset. The experimental results show that PFilter can remove about 48.4% of the points in the local feature map and reduce feature points in scan by 19.3% on average, which save 20.9% processing time per frame. In the mean time, we improve the accuracy by 9.4%.
Distributionally Invariant Learning: Rationalization and Practical Algorithms
Jun 07, 2022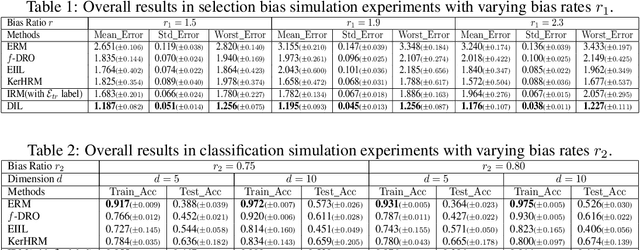
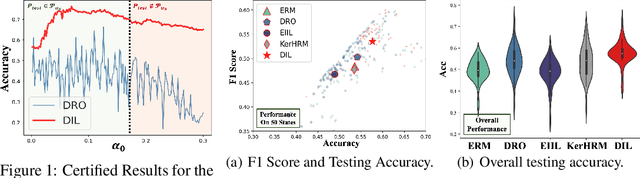

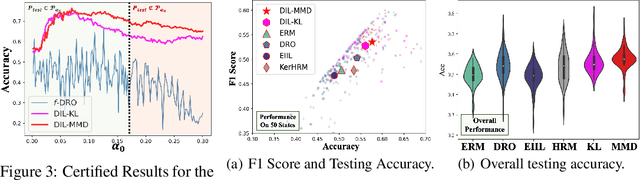
The invariance property across environments is at the heart of invariant learning methods for the Out-of-Distribution (OOD) Generalization problem. Although intuitively reasonable, strong assumptions on the availability and quality of environments have to be made for the learnability of the strict invariance property. Recently, to relax the requirements for environments empirically, some works propose to learn pseudo-environments for invariant learning. However, it could be misleading when pursuing strict invariance under latent heterogeneity, since the underlying invariance could have been violated during the pseudo-environment learning procedure. To this end, we come up with the distributional invariance property as a relaxed alternative to the strict invariance, which considers the invariance only among sub-populations down to a prescribed scale and allows a certain degree of variation. We reformulate the invariant learning problem under latent heterogeneity into a relaxed form that pursues the distributional invariance, based on which we propose our novel Distributionally Invariant Learning (DIL) framework as well as two implementations named DIL-MMD and DIL-KL. Theoretically, we provide the guarantees for the distributional invariance as well as bounds of the generalization error gap. Extensive experimental results validate the effectiveness of our proposed algorithms.
Reinforcement Learning for Robot Navigation with Adaptive ExecutionDuration (AED) in a Semi-Markov Model
Aug 30, 2021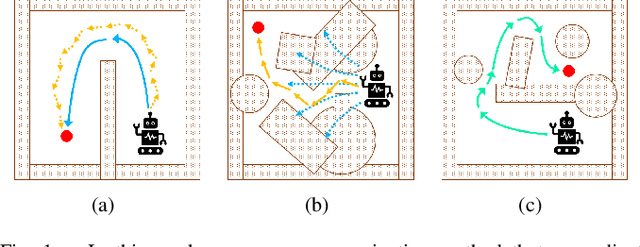
Deep reinforcement learning (DRL) algorithms have proven effective in robot navigation, especially in unknown environments, through directly mapping perception inputs into robot control commands. Most existing methods adopt uniform execution duration with robots taking commands at fixed intervals. As such, the length of execution duration becomes a crucial parameter to the navigation algorithm. In particular, if the duration is too short, then the navigation policy would be executed at a high frequency, with increased training difficulty and high computational cost. Meanwhile, if the duration is too long, then the policy becomes unable to handle complex situations, like those with crowded obstacles. It is thus tricky to find the "sweet" duration range; some duration values may render a DRL model to fail to find a navigation path. In this paper, we propose to employ adaptive execution duration to overcome this problem. Specifically, we formulate the navigation task as a Semi-Markov Decision Process (SMDP) problem to handle adaptive execution duration. We also improve the distributed proximal policy optimization (DPPO) algorithm and provide its theoretical guarantee for the specified SMDP problem. We evaluate our approach both in the simulator and on an actual robot. The results show that our approach outperforms the other DRL-based method (with fixed execution duration) by 10.3% in terms of the navigation success rate.