 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKiana Ehsani
Promptable Behaviors: Personalizing Multi-Objective Rewards from Human Preferences
Dec 14, 2023
Customizing robotic behaviors to be aligned with diverse human preferences is an underexplored challenge in the field of embodied AI. In this paper, we present Promptable Behaviors, a novel framework that facilitates efficient personalization of robotic agents to diverse human preferences in complex environments. We use multi-objective reinforcement learning to train a single policy adaptable to a broad spectrum of preferences. We introduce three distinct methods to infer human preferences by leveraging different types of interactions: (1) human demonstrations, (2) preference feedback on trajectory comparisons, and (3) language instructions. We evaluate the proposed method in personalized object-goal navigation and flee navigation tasks in ProcTHOR and RoboTHOR, demonstrating the ability to prompt agent behaviors to satisfy human preferences in various scenarios. Project page: https://promptable-behaviors.github.io
Harmonic Mobile Manipulation
Dec 11, 2023Recent advancements in robotics have enabled robots to navigate complex scenes or manipulate diverse objects independently. However, robots are still impotent in many household tasks requiring coordinated behaviors such as opening doors. The factorization of navigation and manipulation, while effective for some tasks, fails in scenarios requiring coordinated actions. To address this challenge, we introduce, HarmonicMM, an end-to-end learning method that optimizes both navigation and manipulation, showing notable improvement over existing techniques in everyday tasks. This approach is validated in simulated and real-world environments and adapts to novel unseen settings without additional tuning. Our contributions include a new benchmark for mobile manipulation and the successful deployment in a real unseen apartment, demonstrating the potential for practical indoor robot deployment in daily life. More results are on our project site: https://rchalyang.github.io/HarmonicMM/
Imitating Shortest Paths in Simulation Enables Effective Navigation and Manipulation in the Real World
Dec 05, 2023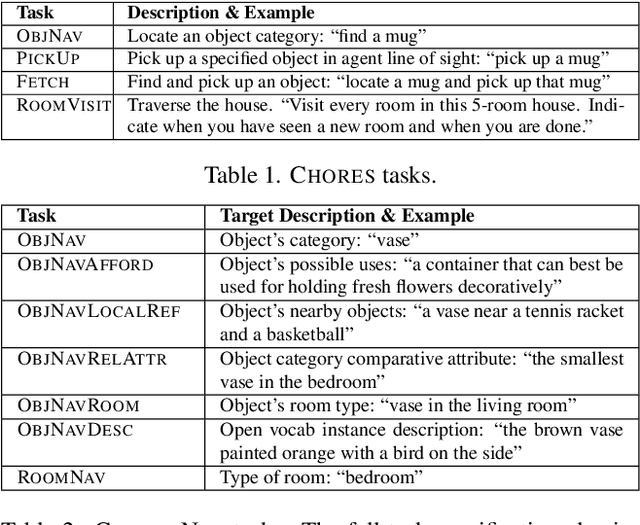
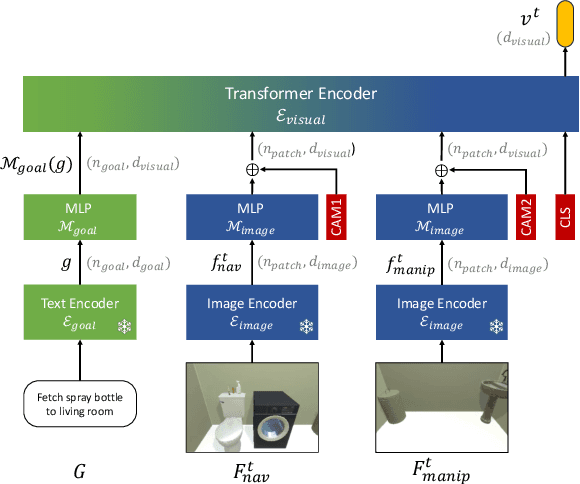
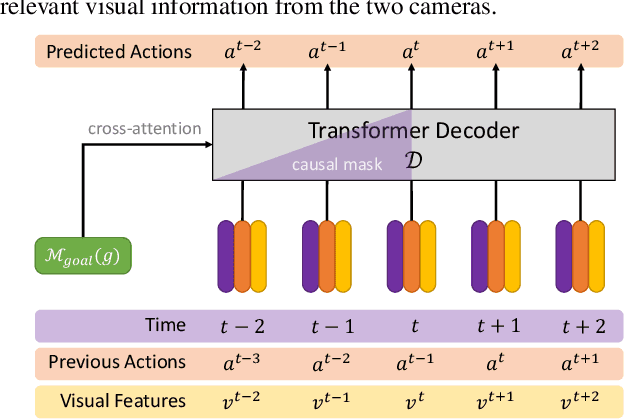

Reinforcement learning (RL) with dense rewards and imitation learning (IL) with human-generated trajectories are the most widely used approaches for training modern embodied agents. RL requires extensive reward shaping and auxiliary losses and is often too slow and ineffective for long-horizon tasks. While IL with human supervision is effective, collecting human trajectories at scale is extremely expensive. In this work, we show that imitating shortest-path planners in simulation produces agents that, given a language instruction, can proficiently navigate, explore, and manipulate objects in both simulation and in the real world using only RGB sensors (no depth map or GPS coordinates). This surprising result is enabled by our end-to-end, transformer-based, SPOC architecture, powerful visual encoders paired with extensive image augmentation, and the dramatic scale and diversity of our training data: millions of frames of shortest-path-expert trajectories collected inside approximately 200,000 procedurally generated houses containing 40,000 unique 3D assets. Our models, data, training code, and newly proposed 10-task benchmarking suite CHORES will be open-sourced.
Objaverse-XL: A Universe of 10M+ 3D Objects
Jul 11, 2023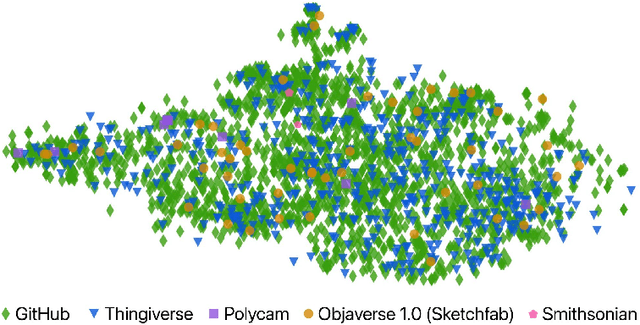

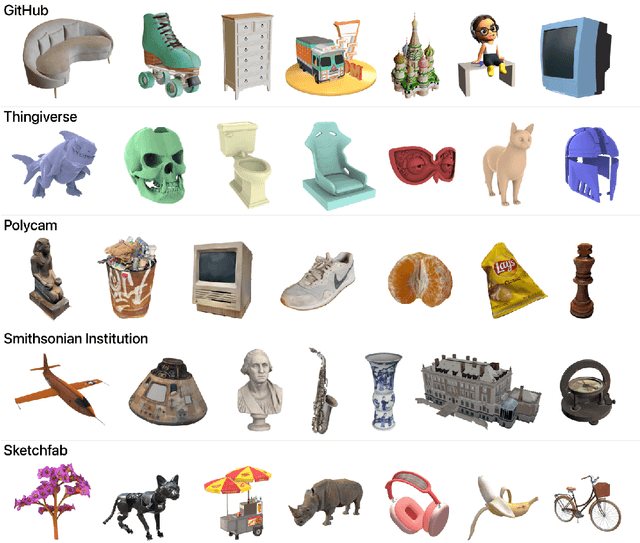
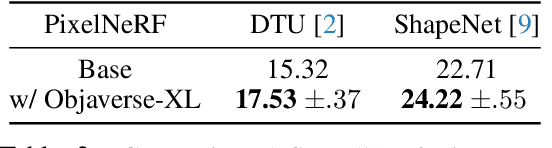
Natural language processing and 2D vision models have attained remarkable proficiency on many tasks primarily by escalating the scale of training data. However, 3D vision tasks have not seen the same progress, in part due to the challenges of acquiring high-quality 3D data. In this work, we present Objaverse-XL, a dataset of over 10 million 3D objects. Our dataset comprises deduplicated 3D objects from a diverse set of sources, including manually designed objects, photogrammetry scans of landmarks and everyday items, and professional scans of historic and antique artifacts. Representing the largest scale and diversity in the realm of 3D datasets, Objaverse-XL enables significant new possibilities for 3D vision. Our experiments demonstrate the improvements enabled with the scale provided by Objaverse-XL. We show that by training Zero123 on novel view synthesis, utilizing over 100 million multi-view rendered images, we achieve strong zero-shot generalization abilities. We hope that releasing Objaverse-XL will enable further innovations in the field of 3D vision at scale.
Objaverse: A Universe of Annotated 3D Objects
Dec 15, 2022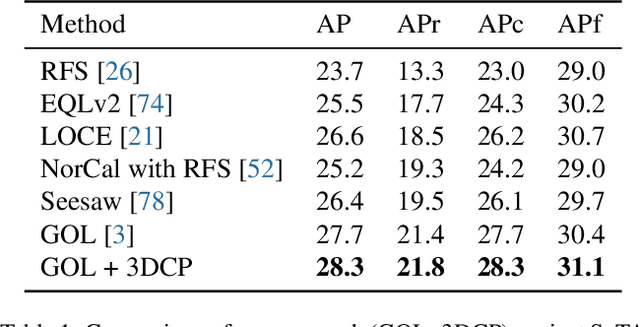
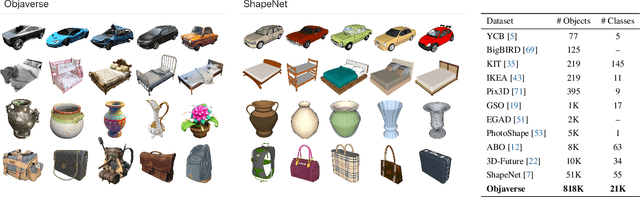
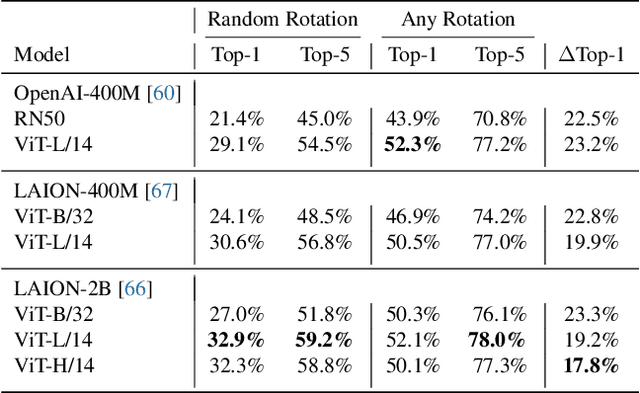
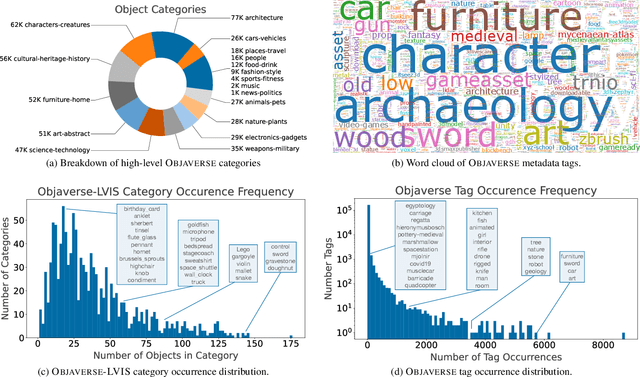
Massive data corpora like WebText, Wikipedia, Conceptual Captions, WebImageText, and LAION have propelled recent dramatic progress in AI. Large neural models trained on such datasets produce impressive results and top many of today's benchmarks. A notable omission within this family of large-scale datasets is 3D data. Despite considerable interest and potential applications in 3D vision, datasets of high-fidelity 3D models continue to be mid-sized with limited diversity of object categories. Addressing this gap, we present Objaverse 1.0, a large dataset of objects with 800K+ (and growing) 3D models with descriptive captions, tags, and animations. Objaverse improves upon present day 3D repositories in terms of scale, number of categories, and in the visual diversity of instances within a category. We demonstrate the large potential of Objaverse via four diverse applications: training generative 3D models, improving tail category segmentation on the LVIS benchmark, training open-vocabulary object-navigation models for Embodied AI, and creating a new benchmark for robustness analysis of vision models. Objaverse can open new directions for research and enable new applications across the field of AI.
Phone2Proc: Bringing Robust Robots Into Our Chaotic World
Dec 08, 2022

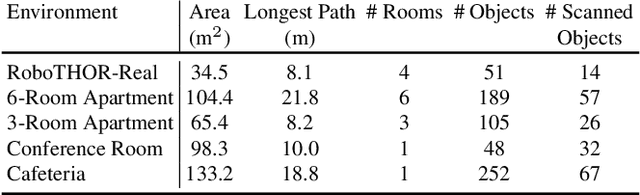
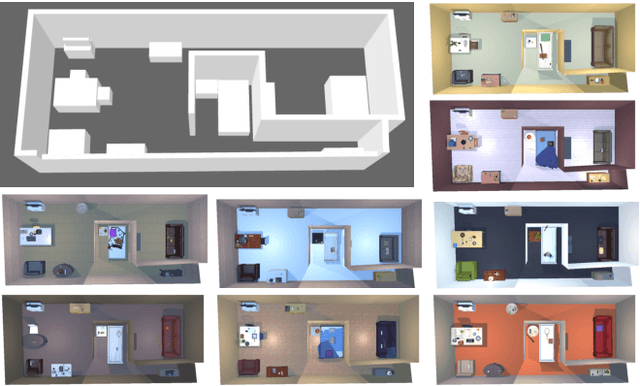
Training embodied agents in simulation has become mainstream for the embodied AI community. However, these agents often struggle when deployed in the physical world due to their inability to generalize to real-world environments. In this paper, we present Phone2Proc, a method that uses a 10-minute phone scan and conditional procedural generation to create a distribution of training scenes that are semantically similar to the target environment. The generated scenes are conditioned on the wall layout and arrangement of large objects from the scan, while also sampling lighting, clutter, surface textures, and instances of smaller objects with randomized placement and materials. Leveraging just a simple RGB camera, training with Phone2Proc shows massive improvements from 34.7% to 70.7% success rate in sim-to-real ObjectNav performance across a test suite of over 200 trials in diverse real-world environments, including homes, offices, and RoboTHOR. Furthermore, Phone2Proc's diverse distribution of generated scenes makes agents remarkably robust to changes in the real world, such as human movement, object rearrangement, lighting changes, or clutter.
Retrospectives on the Embodied AI Workshop
Oct 17, 2022
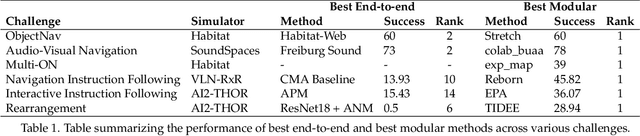
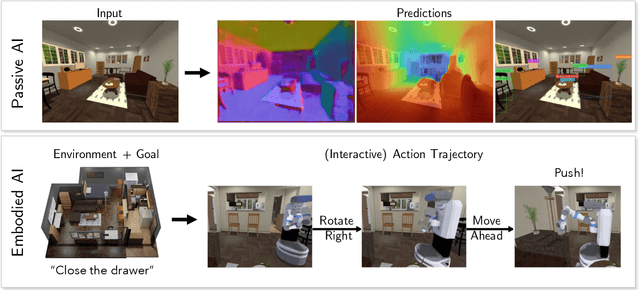
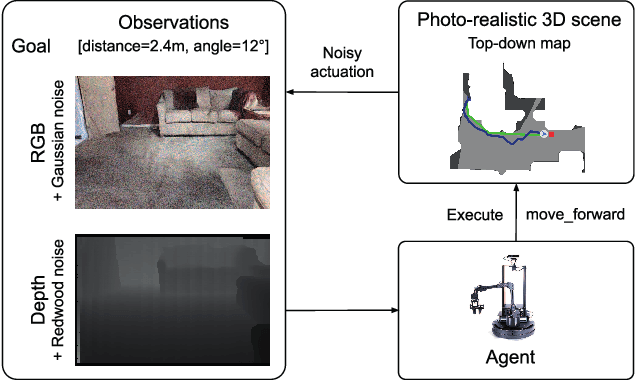
We present a retrospective on the state of Embodied AI research. Our analysis focuses on 13 challenges presented at the Embodied AI Workshop at CVPR. These challenges are grouped into three themes: (1) visual navigation, (2) rearrangement, and (3) embodied vision-and-language. We discuss the dominant datasets within each theme, evaluation metrics for the challenges, and the performance of state-of-the-art models. We highlight commonalities between top approaches to the challenges and identify potential future directions for Embodied AI research.
Structure from Action: Learning Interactions for Articulated Object 3D Structure Discovery
Jul 19, 2022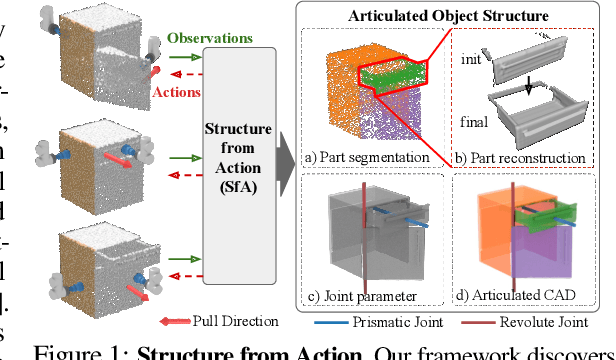
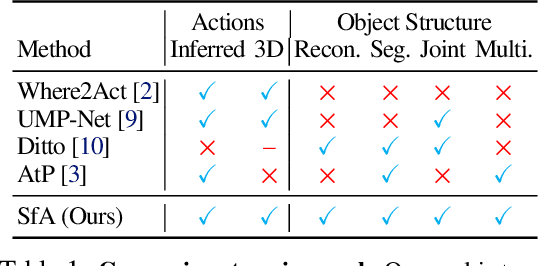
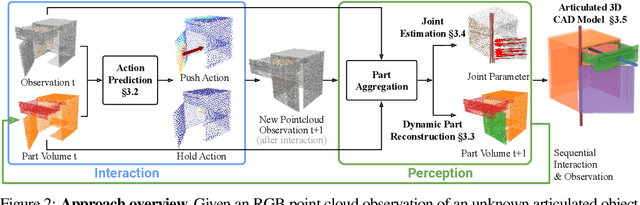

Articulated objects are abundant in daily life. Discovering their parts, joints, and kinematics is crucial for robots to interact with these objects. We introduce Structure from Action (SfA), a framework that discovers the 3D part geometry and joint parameters of unseen articulated objects via a sequence of inferred interactions. Our key insight is that 3D interaction and perception should be considered in conjunction to construct 3D articulated CAD models, especially in the case of categories not seen during training. By selecting informative interactions, SfA discovers parts and reveals initially occluded surfaces, like the inside of a closed drawer. By aggregating visual observations in 3D, SfA accurately segments multiple parts, reconstructs part geometry, and infers all joint parameters in a canonical coordinate frame. Our experiments demonstrate that a single SfA model trained in simulation can generalize to many unseen object categories with unknown kinematic structures and to real-world objects. Code and data will be publicly available.
ProcTHOR: Large-Scale Embodied AI Using Procedural Generation
Jun 14, 2022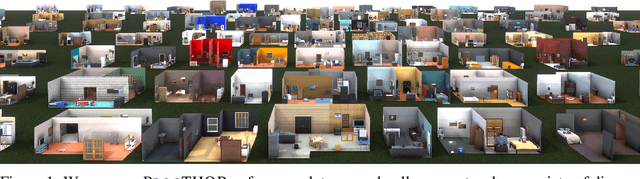


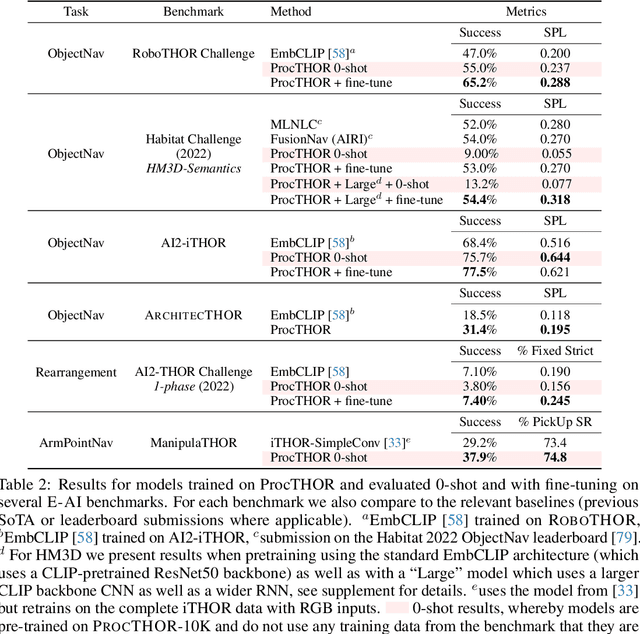
Massive datasets and high-capacity models have driven many recent advancements in computer vision and natural language understanding. This work presents a platform to enable similar success stories in Embodied AI. We propose ProcTHOR, a framework for procedural generation of Embodied AI environments. ProcTHOR enables us to sample arbitrarily large datasets of diverse, interactive, customizable, and performant virtual environments to train and evaluate embodied agents across navigation, interaction, and manipulation tasks. We demonstrate the power and potential of ProcTHOR via a sample of 10,000 generated houses and a simple neural model. Models trained using only RGB images on ProcTHOR, with no explicit mapping and no human task supervision produce state-of-the-art results across 6 embodied AI benchmarks for navigation, rearrangement, and arm manipulation, including the presently running Habitat 2022, AI2-THOR Rearrangement 2022, and RoboTHOR challenges. We also demonstrate strong 0-shot results on these benchmarks, via pre-training on ProcTHOR with no fine-tuning on the downstream benchmark, often beating previous state-of-the-art systems that access the downstream training data.
Continuous Scene Representations for Embodied AI
Mar 31, 2022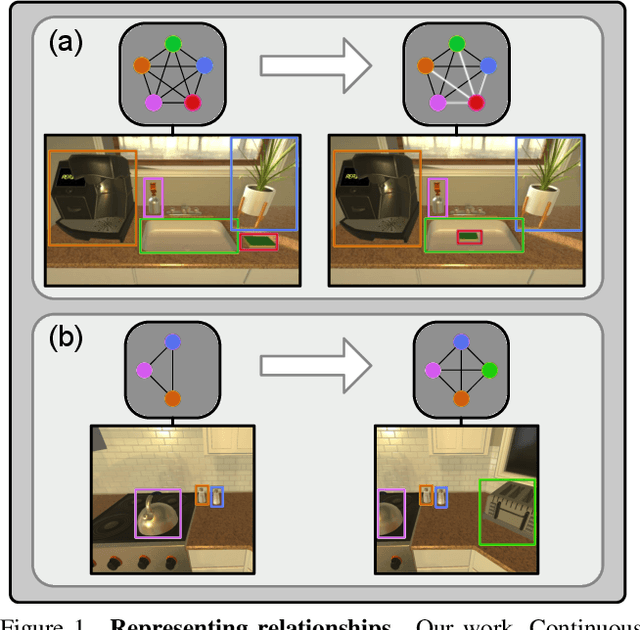
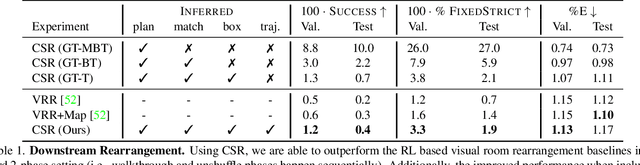

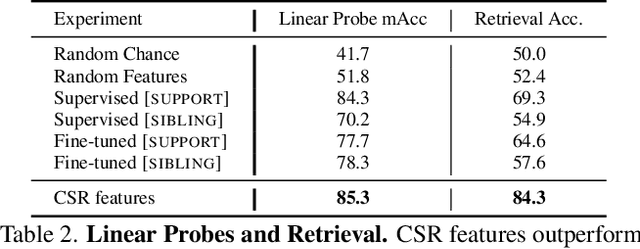
We propose Continuous Scene Representations (CSR), a scene representation constructed by an embodied agent navigating within a space, where objects and their relationships are modeled by continuous valued embeddings. Our method captures feature relationships between objects, composes them into a graph structure on-the-fly, and situates an embodied agent within the representation. Our key insight is to embed pair-wise relationships between objects in a latent space. This allows for a richer representation compared to discrete relations (e.g., [support], [next-to]) commonly used for building scene representations. CSR can track objects as the agent moves in a scene, update the representation accordingly, and detect changes in room configurations. Using CSR, we outperform state-of-the-art approaches for the challenging downstream task of visual room rearrangement, without any task specific training. Moreover, we show the learned embeddings capture salient spatial details of the scene and show applicability to real world data. A summery video and code is available at https://prior.allenai.org/projects/csr.