 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMuzhi Han
Ag2Manip: Learning Novel Manipulation Skills with Agent-Agnostic Visual and Action Representations
Apr 26, 2024
Autonomous robotic systems capable of learning novel manipulation tasks are poised to transform industries from manufacturing to service automation. However, modern methods (e.g., VIP and R3M) still face significant hurdles, notably the domain gap among robotic embodiments and the sparsity of successful task executions within specific action spaces, resulting in misaligned and ambiguous task representations. We introduce Ag2Manip (Agent-Agnostic representations for Manipulation), a framework aimed at surmounting these challenges through two key innovations: a novel agent-agnostic visual representation derived from human manipulation videos, with the specifics of embodiments obscured to enhance generalizability; and an agent-agnostic action representation abstracting a robot's kinematics to a universal agent proxy, emphasizing crucial interactions between end-effector and object. Ag2Manip's empirical validation across simulated benchmarks like FrankaKitchen, ManiSkill, and PartManip shows a 325% increase in performance, achieved without domain-specific demonstrations. Ablation studies underline the essential contributions of the visual and action representations to this success. Extending our evaluations to the real world, Ag2Manip significantly improves imitation learning success rates from 50% to 77.5%, demonstrating its effectiveness and generalizability across both simulated and physical environments.
Closed-Loop Open-Vocabulary Mobile Manipulation with GPT-4V
Apr 16, 2024Autonomous robot navigation and manipulation in open environments require reasoning and replanning with closed-loop feedback. We present COME-robot, the first closed-loop framework utilizing the GPT-4V vision-language foundation model for open-ended reasoning and adaptive planning in real-world scenarios. We meticulously construct a library of action primitives for robot exploration, navigation, and manipulation, serving as callable execution modules for GPT-4V in task planning. On top of these modules, GPT-4V serves as the brain that can accomplish multimodal reasoning, generate action policy with code, verify the task progress, and provide feedback for replanning. Such design enables COME-robot to (i) actively perceive the environments, (ii) perform situated reasoning, and (iii) recover from failures. Through comprehensive experiments involving 8 challenging real-world tabletop and manipulation tasks, COME-robot demonstrates a significant improvement in task success rate (~25%) compared to state-of-the-art baseline methods. We further conduct comprehensive analyses to elucidate how COME-robot's design facilitates failure recovery, free-form instruction following, and long-horizon task planning.
LLM3:Large Language Model-based Task and Motion Planning with Motion Failure Reasoning
Mar 20, 2024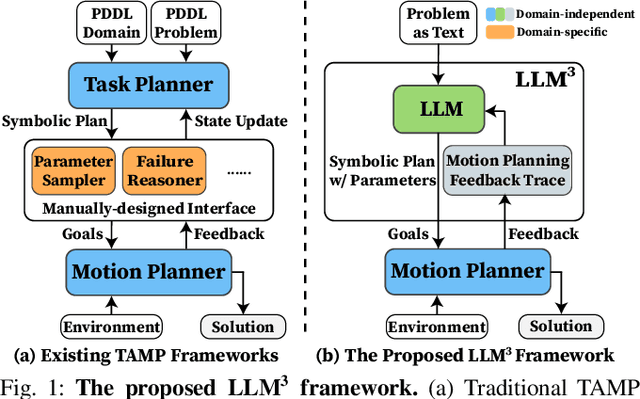
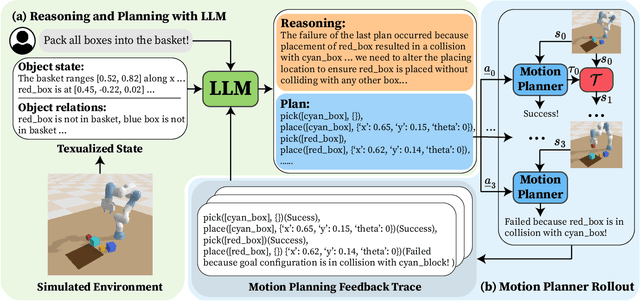
Conventional Task and Motion Planning (TAMP) approaches rely on manually crafted interfaces connecting symbolic task planning with continuous motion generation. These domain-specific and labor-intensive modules are limited in addressing emerging tasks in real-world settings. Here, we present LLM^3, a novel Large Language Model (LLM)-based TAMP framework featuring a domain-independent interface. Specifically, we leverage the powerful reasoning and planning capabilities of pre-trained LLMs to propose symbolic action sequences and select continuous action parameters for motion planning. Crucially, LLM^3 incorporates motion planning feedback through prompting, allowing the LLM to iteratively refine its proposals by reasoning about motion failure. Consequently, LLM^3 interfaces between task planning and motion planning, alleviating the intricate design process of handling domain-specific messages between them. Through a series of simulations in a box-packing domain, we quantitatively demonstrate the effectiveness of LLM^3 in solving TAMP problems and the efficiency in selecting action parameters. Ablation studies underscore the significant contribution of motion failure reasoning to the success of LLM^3. Furthermore, we conduct qualitative experiments on a physical manipulator, demonstrating the practical applicability of our approach in real-world settings.
Part-level Scene Reconstruction Affords Robot Interaction
Aug 01, 2023



Existing methods for reconstructing interactive scenes primarily focus on replacing reconstructed objects with CAD models retrieved from a limited database, resulting in significant discrepancies between the reconstructed and observed scenes. To address this issue, our work introduces a part-level reconstruction approach that reassembles objects using primitive shapes. This enables us to precisely replicate the observed physical scenes and simulate robot interactions with both rigid and articulated objects. By segmenting reconstructed objects into semantic parts and aligning primitive shapes to these parts, we assemble them as CAD models while estimating kinematic relations, including parent-child contact relations, joint types, and parameters. Specifically, we derive the optimal primitive alignment by solving a series of optimization problems, and estimate kinematic relations based on part semantics and geometry. Our experiments demonstrate that part-level scene reconstruction outperforms object-level reconstruction by accurately capturing finer details and improving precision. These reconstructed part-level interactive scenes provide valuable kinematic information for various robotic applications; we showcase the feasibility of certifying mobile manipulation planning in these interactive scenes before executing tasks in the physical world.
Reconstructing Interactive 3D Scenes by Panoptic Mapping and CAD Model Alignments
Mar 30, 2021



In this paper, we rethink the problem of scene reconstruction from an embodied agent's perspective: While the classic view focuses on the reconstruction accuracy, our new perspective emphasizes the underlying functions and constraints such that the reconstructed scenes provide \em{actionable} information for simulating \em{interactions} with agents. Here, we address this challenging problem by reconstructing an interactive scene using RGB-D data stream, which captures (i) the semantics and geometry of objects and layouts by a 3D volumetric panoptic mapping module, and (ii) object affordance and contextual relations by reasoning over physical common sense among objects, organized by a graph-based scene representation. Crucially, this reconstructed scene replaces the object meshes in the dense panoptic map with part-based articulated CAD models for finer-grained robot interactions. In the experiments, we demonstrate that (i) our panoptic mapping module outperforms previous state-of-the-art methods, (ii) a high-performant physical reasoning procedure that matches, aligns, and replaces objects' meshes with best-fitted CAD models, and (iii) reconstructed scenes are physically plausible and naturally afford actionable interactions; without any manual labeling, they are seamlessly imported to ROS-based simulators and virtual environments for complex robot task executions.