 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrevor Darrell
EgoPet: Egomotion and Interaction Data from an Animal's Perspective
Apr 15, 2024
Animals perceive the world to plan their actions and interact with other agents to accomplish complex tasks, demonstrating capabilities that are still unmatched by AI systems. To advance our understanding and reduce the gap between the capabilities of animals and AI systems, we introduce a dataset of pet egomotion imagery with diverse examples of simultaneous egomotion and multi-agent interaction. Current video datasets separately contain egomotion and interaction examples, but rarely both at the same time. In addition, EgoPet offers a radically distinct perspective from existing egocentric datasets of humans or vehicles. We define two in-domain benchmark tasks that capture animal behavior, and a third benchmark to assess the utility of EgoPet as a pretraining resource to robotic quadruped locomotion, showing that models trained from EgoPet outperform those trained from prior datasets.
Finding Visual Task Vectors
Apr 08, 2024Visual Prompting is a technique for teaching models to perform a visual task via in-context examples, without any additional training. In this work, we analyze the activations of MAE-VQGAN, a recent Visual Prompting model, and find task vectors, activations that encode task-specific information. Equipped with this insight, we demonstrate that it is possible to identify the task vectors and use them to guide the network towards performing different tasks without providing any input-output examples. To find task vectors, we compute the average intermediate activations per task and use the REINFORCE algorithm to search for the subset of task vectors. The resulting task vectors guide the model towards performing a task better than the original model without the need for input-output examples.
ALOHa: A New Measure for Hallucination in Captioning Models
Apr 03, 2024Despite recent advances in multimodal pre-training for visual description, state-of-the-art models still produce captions containing errors, such as hallucinating objects not present in a scene. The existing prominent metric for object hallucination, CHAIR, is limited to a fixed set of MS COCO objects and synonyms. In this work, we propose a modernized open-vocabulary metric, ALOHa, which leverages large language models (LLMs) to measure object hallucinations. Specifically, we use an LLM to extract groundable objects from a candidate caption, measure their semantic similarity to reference objects from captions and object detections, and use Hungarian matching to produce a final hallucination score. We show that ALOHa correctly identifies 13.6% more hallucinated objects than CHAIR on HAT, a new gold-standard subset of MS COCO Captions annotated for hallucinations, and 30.8% more on nocaps, where objects extend beyond MS COCO categories. Our code is available at https://davidmchan.github.io/aloha/.
TraveLER: A Multi-LMM Agent Framework for Video Question-Answering
Apr 01, 2024Recently, Large Multimodal Models (LMMs) have made significant progress in video question-answering using a frame-wise approach by leveraging large-scale, image-based pretraining in a zero-shot manner. While image-based methods for videos have shown impressive performance, a current limitation is that they often overlook how key timestamps are selected and cannot adjust when incorrect timestamps are identified. Moreover, they are unable to extract details relevant to the question, instead providing general descriptions of the frame. To overcome this, we design a multi-LMM agent framework that travels along the video, iteratively collecting relevant information from keyframes through interactive question-asking until there is sufficient information to answer the question. Specifically, we propose TraveLER, a model that can create a plan to "Traverse" through the video, ask questions about individual frames to "Locate" and store key information, and then "Evaluate" if there is enough information to answer the question. Finally, if there is not enough information, our method is able to "Replan" based on its collected knowledge. Through extensive experiments, we find that the proposed TraveLER approach improves performance on several video question-answering benchmarks, such as NExT-QA, STAR, and Perception Test, without the need to fine-tune on specific datasets.
When Do We Not Need Larger Vision Models?
Mar 19, 2024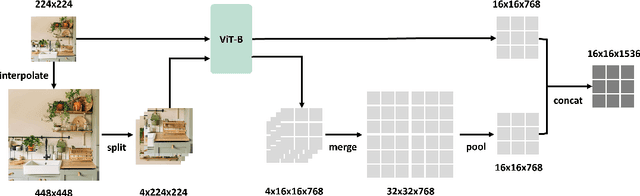
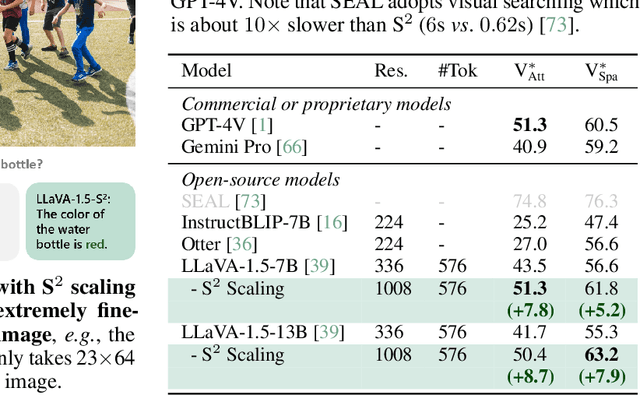
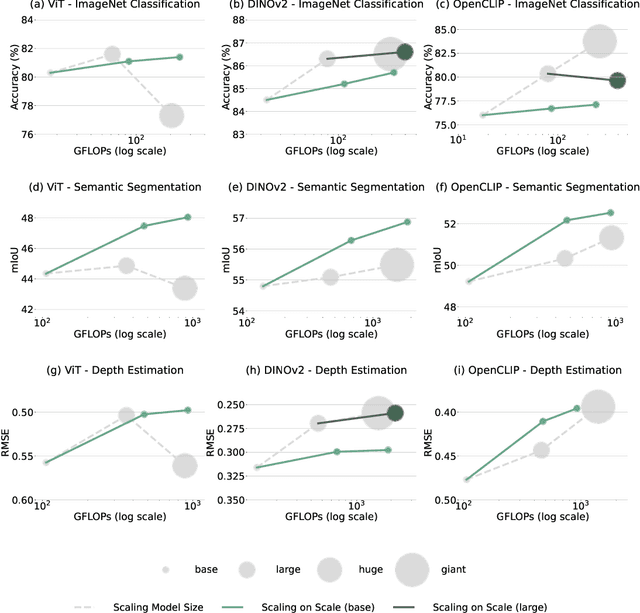
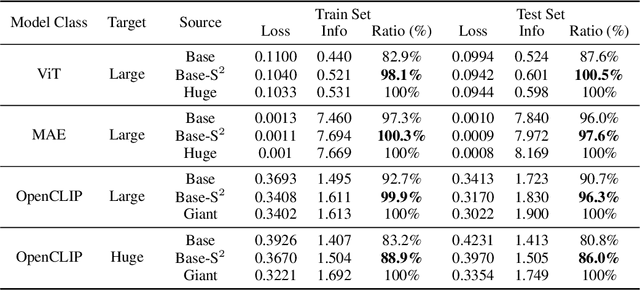
Scaling up the size of vision models has been the de facto standard to obtain more powerful visual representations. In this work, we discuss the point beyond which larger vision models are not necessary. First, we demonstrate the power of Scaling on Scales (S$^2$), whereby a pre-trained and frozen smaller vision model (e.g., ViT-B or ViT-L), run over multiple image scales, can outperform larger models (e.g., ViT-H or ViT-G) on classification, segmentation, depth estimation, Multimodal LLM (MLLM) benchmarks, and robotic manipulation. Notably, S$^2$ achieves state-of-the-art performance in detailed understanding of MLLM on the V* benchmark, surpassing models such as GPT-4V. We examine the conditions under which S$^2$ is a preferred scaling approach compared to scaling on model size. While larger models have the advantage of better generalization on hard examples, we show that features of larger vision models can be well approximated by those of multi-scale smaller models. This suggests most, if not all, of the representations learned by current large pre-trained models can also be obtained from multi-scale smaller models. Our results show that a multi-scale smaller model has comparable learning capacity to a larger model, and pre-training smaller models with S$^2$ can match or even exceed the advantage of larger models. We release a Python package that can apply S$^2$ on any vision model with one line of code: https://github.com/bfshi/scaling_on_scales.
xT: Nested Tokenization for Larger Context in Large Images
Mar 04, 2024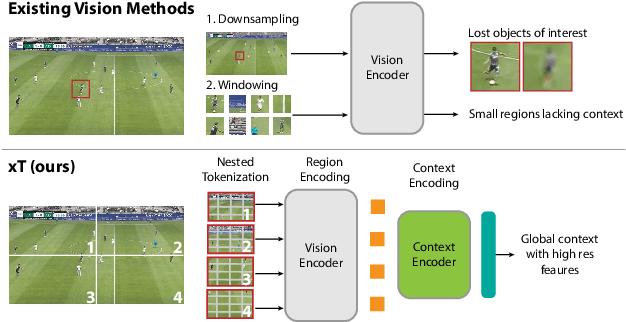
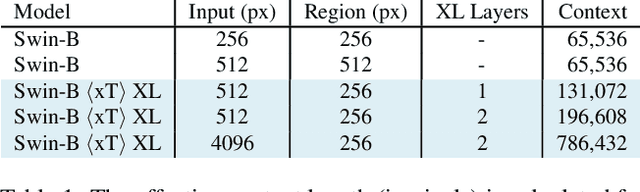
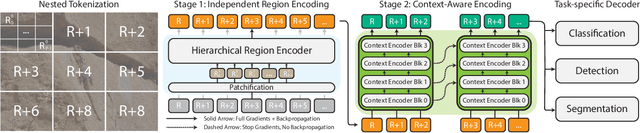
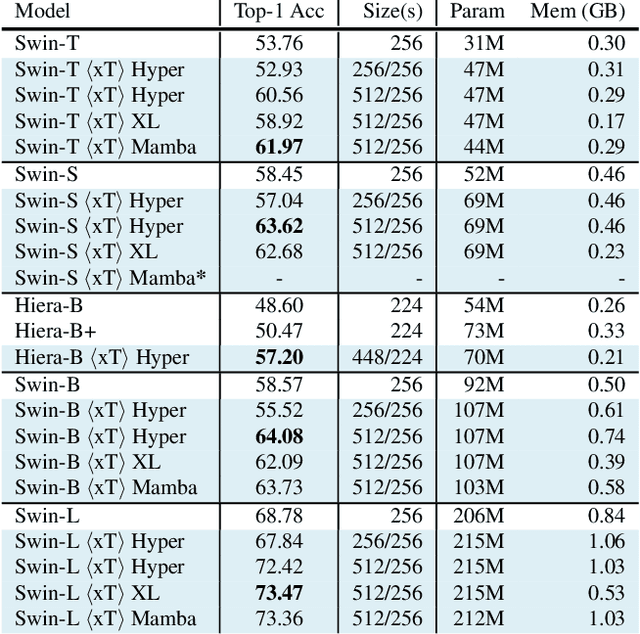
Modern computer vision pipelines handle large images in one of two sub-optimal ways: down-sampling or cropping. These two methods incur significant losses in the amount of information and context present in an image. There are many downstream applications in which global context matters as much as high frequency details, such as in real-world satellite imagery; in such cases researchers have to make the uncomfortable choice of which information to discard. We introduce xT, a simple framework for vision transformers which effectively aggregates global context with local details and can model large images end-to-end on contemporary GPUs. We select a set of benchmark datasets across classic vision tasks which accurately reflect a vision model's ability to understand truly large images and incorporate fine details over large scales and assess our method's improvement on them. By introducing a nested tokenization scheme for large images in conjunction with long-sequence length models normally used for natural language processing, we are able to increase accuracy by up to 8.6% on challenging classification tasks and $F_1$ score by 11.6 on context-dependent segmentation in large images.
Humanoid Locomotion as Next Token Prediction
Feb 29, 2024We cast real-world humanoid control as a next token prediction problem, akin to predicting the next word in language. Our model is a causal transformer trained via autoregressive prediction of sensorimotor trajectories. To account for the multi-modal nature of the data, we perform prediction in a modality-aligned way, and for each input token predict the next token from the same modality. This general formulation enables us to leverage data with missing modalities, like video trajectories without actions. We train our model on a collection of simulated trajectories coming from prior neural network policies, model-based controllers, motion capture data, and YouTube videos of humans. We show that our model enables a full-sized humanoid to walk in San Francisco zero-shot. Our model can transfer to the real world even when trained on only 27 hours of walking data, and can generalize to commands not seen during training like walking backward. These findings suggest a promising path toward learning challenging real-world control tasks by generative modeling of sensorimotor trajectories.
Neural Network Diffusion
Feb 20, 2024Diffusion models have achieved remarkable success in image and video generation. In this work, we demonstrate that diffusion models can also \textit{generate high-performing neural network parameters}. Our approach is simple, utilizing an autoencoder and a standard latent diffusion model. The autoencoder extracts latent representations of a subset of the trained network parameters. A diffusion model is then trained to synthesize these latent parameter representations from random noise. It then generates new representations that are passed through the autoencoder's decoder, whose outputs are ready to use as new subsets of network parameters. Across various architectures and datasets, our diffusion process consistently generates models of comparable or improved performance over trained networks, with minimal additional cost. Notably, we empirically find that the generated models perform differently with the trained networks. Our results encourage more exploration on the versatile use of diffusion models.
InstanceDiffusion: Instance-level Control for Image Generation
Feb 05, 2024Text-to-image diffusion models produce high quality images but do not offer control over individual instances in the image. We introduce InstanceDiffusion that adds precise instance-level control to text-to-image diffusion models. InstanceDiffusion supports free-form language conditions per instance and allows flexible ways to specify instance locations such as simple single points, scribbles, bounding boxes or intricate instance segmentation masks, and combinations thereof. We propose three major changes to text-to-image models that enable precise instance-level control. Our UniFusion block enables instance-level conditions for text-to-image models, the ScaleU block improves image fidelity, and our Multi-instance Sampler improves generations for multiple instances. InstanceDiffusion significantly surpasses specialized state-of-the-art models for each location condition. Notably, on the COCO dataset, we outperform previous state-of-the-art by 20.4% AP$_{50}^\text{box}$ for box inputs, and 25.4% IoU for mask inputs.
Rethinking Patch Dependence for Masked Autoencoders
Jan 25, 2024In this work, we re-examine inter-patch dependencies in the decoding mechanism of masked autoencoders (MAE). We decompose this decoding mechanism for masked patch reconstruction in MAE into self-attention and cross-attention. Our investigations suggest that self-attention between mask patches is not essential for learning good representations. To this end, we propose a novel pretraining framework: Cross-Attention Masked Autoencoders (CrossMAE). CrossMAE's decoder leverages only cross-attention between masked and visible tokens, with no degradation in downstream performance. This design also enables decoding only a small subset of mask tokens, boosting efficiency. Furthermore, each decoder block can now leverage different encoder features, resulting in improved representation learning. CrossMAE matches MAE in performance with 2.5 to 3.7$\times$ less decoding compute. It also surpasses MAE on ImageNet classification and COCO instance segmentation under the same compute. Code and models: https://crossmae.github.io