 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXuelin Chen
Taming Diffusion Probabilistic Models for Character Control
Apr 23, 2024
We present a novel character control framework that effectively utilizes motion diffusion probabilistic models to generate high-quality and diverse character animations, responding in real-time to a variety of dynamic user-supplied control signals. At the heart of our method lies a transformer-based Conditional Autoregressive Motion Diffusion Model (CAMDM), which takes as input the character's historical motion and can generate a range of diverse potential future motions conditioned on high-level, coarse user control. To meet the demands for diversity, controllability, and computational efficiency required by a real-time controller, we incorporate several key algorithmic designs. These include separate condition tokenization, classifier-free guidance on past motion, and heuristic future trajectory extension, all designed to address the challenges associated with taming motion diffusion probabilistic models for character control. As a result, our work represents the first model that enables real-time generation of high-quality, diverse character animations based on user interactive control, supporting animating the character in multiple styles with a single unified model. We evaluate our method on a diverse set of locomotion skills, demonstrating the merits of our method over existing character controllers. Project page and source codes: https://aiganimation.github.io/CAMDM/
SweetDreamer: Aligning Geometric Priors in 2D Diffusion for Consistent Text-to-3D
Oct 04, 2023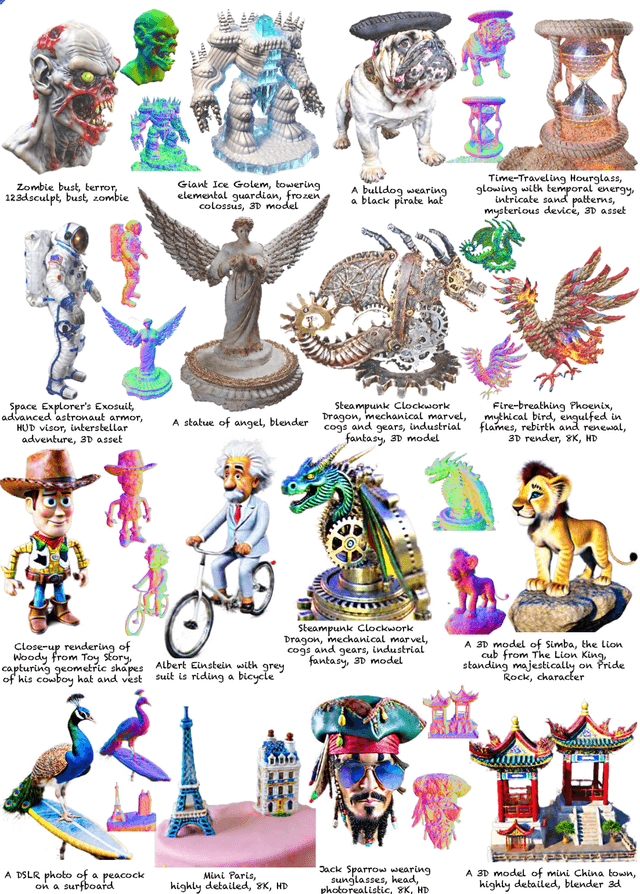

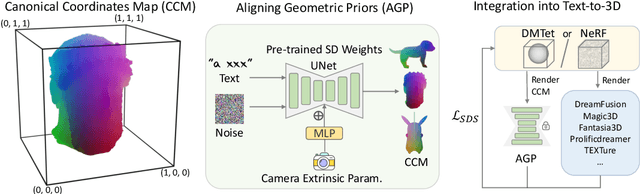
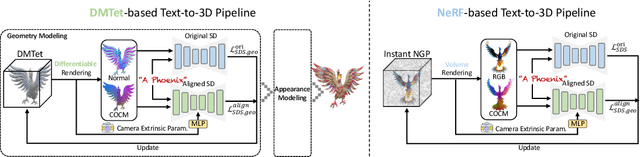
It is inherently ambiguous to lift 2D results from pre-trained diffusion models to a 3D world for text-to-3D generation. 2D diffusion models solely learn view-agnostic priors and thus lack 3D knowledge during the lifting, leading to the multi-view inconsistency problem. We find that this problem primarily stems from geometric inconsistency, and avoiding misplaced geometric structures substantially mitigates the problem in the final outputs. Therefore, we improve the consistency by aligning the 2D geometric priors in diffusion models with well-defined 3D shapes during the lifting, addressing the vast majority of the problem. This is achieved by fine-tuning the 2D diffusion model to be viewpoint-aware and to produce view-specific coordinate maps of canonically oriented 3D objects. In our process, only coarse 3D information is used for aligning. This "coarse" alignment not only resolves the multi-view inconsistency in geometries but also retains the ability in 2D diffusion models to generate detailed and diversified high-quality objects unseen in the 3D datasets. Furthermore, our aligned geometric priors (AGP) are generic and can be seamlessly integrated into various state-of-the-art pipelines, obtaining high generalizability in terms of unseen shapes and visual appearance while greatly alleviating the multi-view inconsistency problem. Our method represents a new state-of-the-art performance with an 85+% consistency rate by human evaluation, while many previous methods are around 30%. Our project page is https://sweetdreamer3d.github.io/
C$\cdot$ASE: Learning Conditional Adversarial Skill Embeddings for Physics-based Characters
Sep 20, 2023
We present C$\cdot$ASE, an efficient and effective framework that learns conditional Adversarial Skill Embeddings for physics-based characters. Our physically simulated character can learn a diverse repertoire of skills while providing controllability in the form of direct manipulation of the skills to be performed. C$\cdot$ASE divides the heterogeneous skill motions into distinct subsets containing homogeneous samples for training a low-level conditional model to learn conditional behavior distribution. The skill-conditioned imitation learning naturally offers explicit control over the character's skills after training. The training course incorporates the focal skill sampling, skeletal residual forces, and element-wise feature masking to balance diverse skills of varying complexities, mitigate dynamics mismatch to master agile motions and capture more general behavior characteristics, respectively. Once trained, the conditional model can produce highly diverse and realistic skills, outperforming state-of-the-art models, and can be repurposed in various downstream tasks. In particular, the explicit skill control handle allows a high-level policy or user to direct the character with desired skill specifications, which we demonstrate is advantageous for interactive character animation.
LivelySpeaker: Towards Semantic-Aware Co-Speech Gesture Generation
Sep 17, 2023
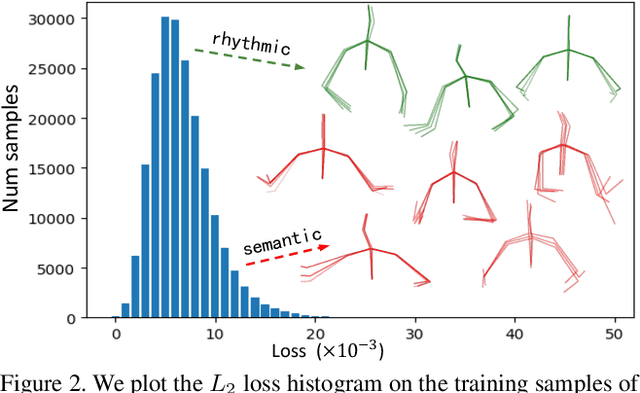
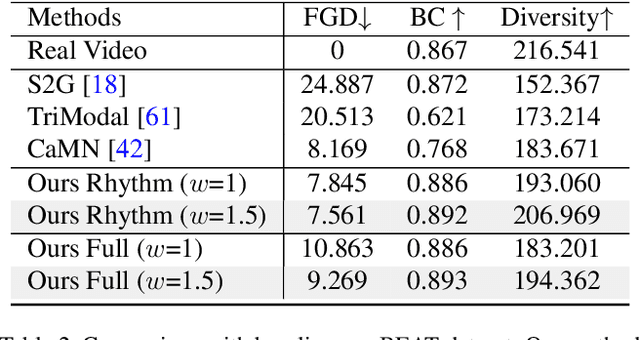
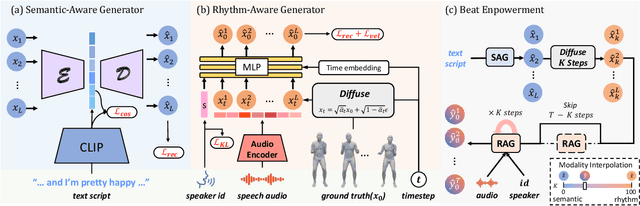
Gestures are non-verbal but important behaviors accompanying people's speech. While previous methods are able to generate speech rhythm-synchronized gestures, the semantic context of the speech is generally lacking in the gesticulations. Although semantic gestures do not occur very regularly in human speech, they are indeed the key for the audience to understand the speech context in a more immersive environment. Hence, we introduce LivelySpeaker, a framework that realizes semantics-aware co-speech gesture generation and offers several control handles. In particular, our method decouples the task into two stages: script-based gesture generation and audio-guided rhythm refinement. Specifically, the script-based gesture generation leverages the pre-trained CLIP text embeddings as the guidance for generating gestures that are highly semantically aligned with the script. Then, we devise a simple but effective diffusion-based gesture generation backbone simply using pure MLPs, that is conditioned on only audio signals and learns to gesticulate with realistic motions. We utilize such powerful prior to rhyme the script-guided gestures with the audio signals, notably in a zero-shot setting. Our novel two-stage generation framework also enables several applications, such as changing the gesticulation style, editing the co-speech gestures via textual prompting, and controlling the semantic awareness and rhythm alignment with guided diffusion. Extensive experiments demonstrate the advantages of the proposed framework over competing methods. In addition, our core diffusion-based generative model also achieves state-of-the-art performance on two benchmarks. The code and model will be released to facilitate future research.
Example-based Motion Synthesis via Generative Motion Matching
Jun 01, 2023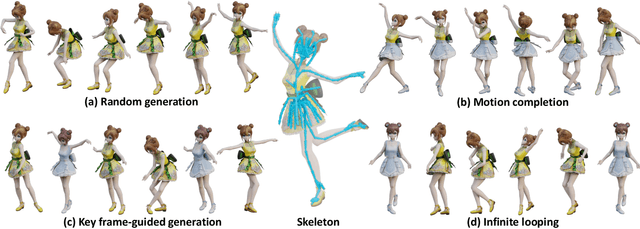
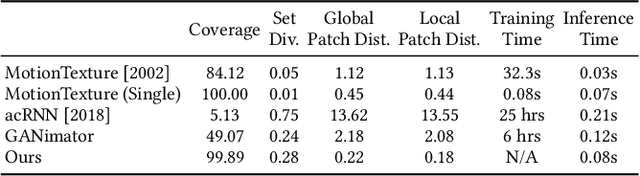

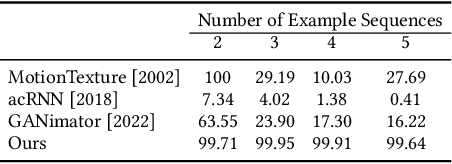
We present GenMM, a generative model that "mines" as many diverse motions as possible from a single or few example sequences. In stark contrast to existing data-driven methods, which typically require long offline training time, are prone to visual artifacts, and tend to fail on large and complex skeletons, GenMM inherits the training-free nature and the superior quality of the well-known Motion Matching method. GenMM can synthesize a high-quality motion within a fraction of a second, even with highly complex and large skeletal structures. At the heart of our generative framework lies the generative motion matching module, which utilizes the bidirectional visual similarity as a generative cost function to motion matching, and operates in a multi-stage framework to progressively refine a random guess using exemplar motion matches. In addition to diverse motion generation, we show the versatility of our generative framework by extending it to a number of scenarios that are not possible with motion matching alone, including motion completion, key frame-guided generation, infinite looping, and motion reassembly. Code and data for this paper are at https://wyysf-98.github.io/GenMM/
Patch-based 3D Natural Scene Generation from a Single Example
Apr 26, 2023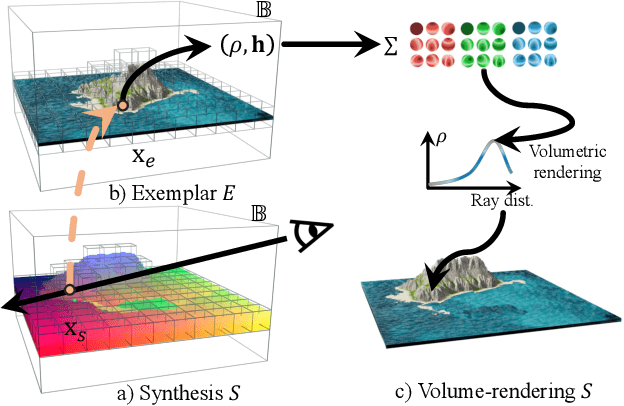
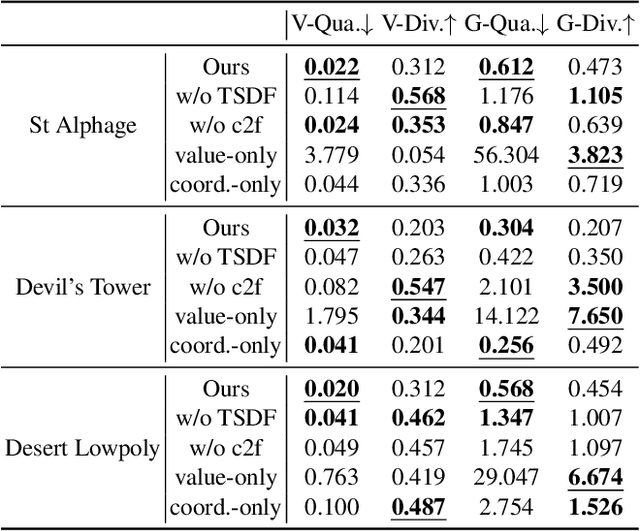
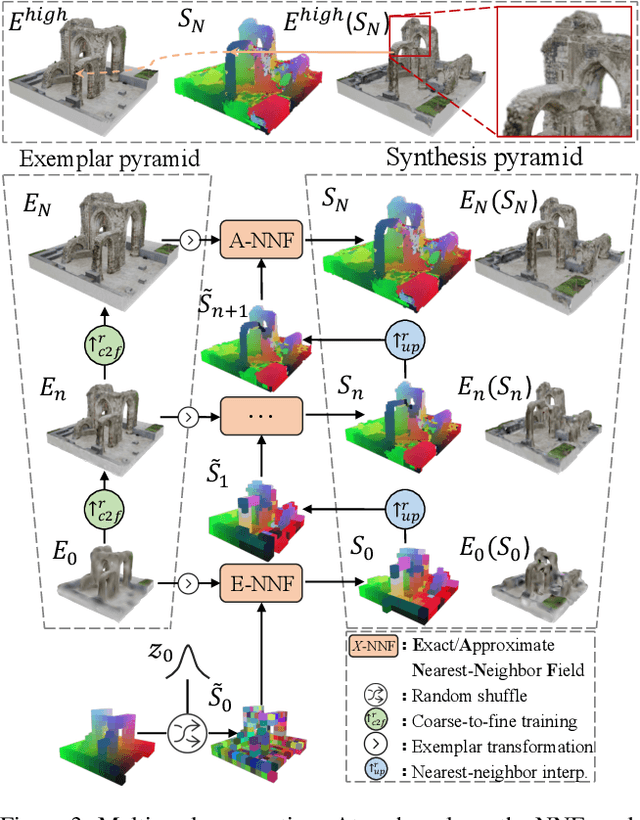
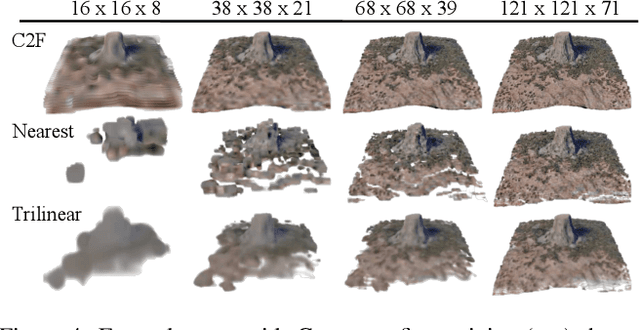
We target a 3D generative model for general natural scenes that are typically unique and intricate. Lacking the necessary volumes of training data, along with the difficulties of having ad hoc designs in presence of varying scene characteristics, renders existing setups intractable. Inspired by classical patch-based image models, we advocate for synthesizing 3D scenes at the patch level, given a single example. At the core of this work lies important algorithmic designs w.r.t the scene representation and generative patch nearest-neighbor module, that address unique challenges arising from lifting classical 2D patch-based framework to 3D generation. These design choices, on a collective level, contribute to a robust, effective, and efficient model that can generate high-quality general natural scenes with both realistic geometric structure and visual appearance, in large quantities and varieties, as demonstrated upon a variety of exemplar scenes.
3D-Aware Object Goal Navigation via Simultaneous Exploration and Identification
Dec 01, 2022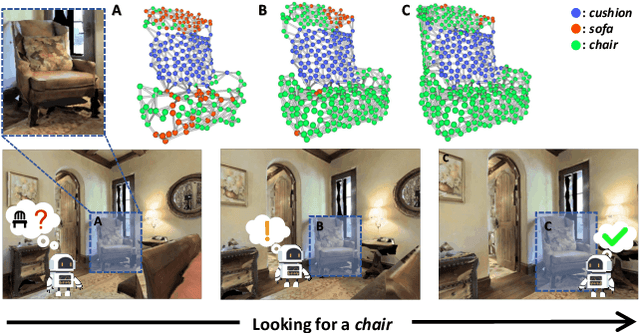
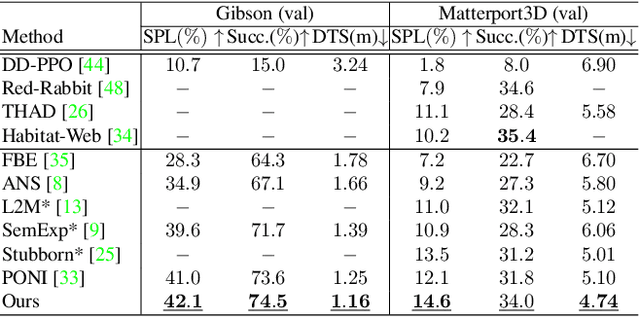
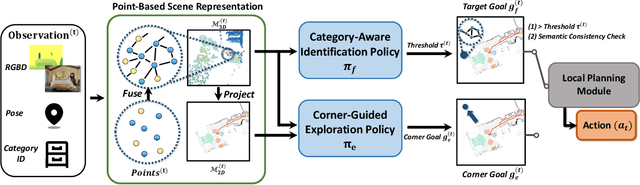
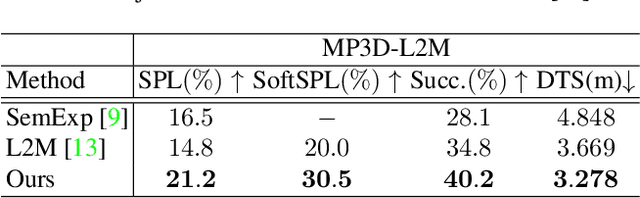
Object goal navigation (ObjectNav) in unseen environments is a fundamental task for Embodied AI. Agents in existing works learn ObjectNav policies based on 2D maps, scene graphs, or image sequences. Considering this task happens in 3D space, a 3D-aware agent can advance its ObjectNav capability via learning from fine-grained spatial information. However, leveraging 3D scene representation can be prohibitively unpractical for policy learning in this floor-level task, due to low sample efficiency and expensive computational cost. In this work, we propose a framework for the challenging 3D-aware ObjectNav based on two straightforward sub-policies. The two sub-polices, namely corner-guided exploration policy and category-aware identification policy, simultaneously perform by utilizing online fused 3D points as observation. Through extensive experiments, we show that this framework can dramatically improve the performance in ObjectNav through learning from 3D scene representation. Our framework achieves the best performance among all modular-based methods on the Matterport3D and Gibson datasets, while requiring (up to 30x) less computational cost for training.
SinGRAV: Learning a Generative Radiance Volume from a Single Natural Scene
Oct 08, 2022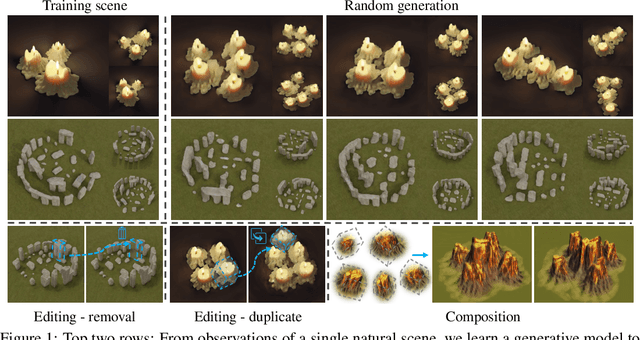
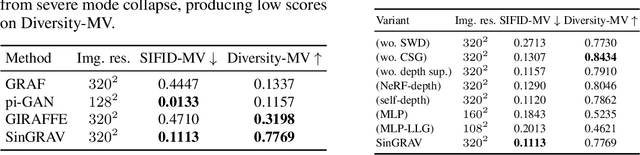
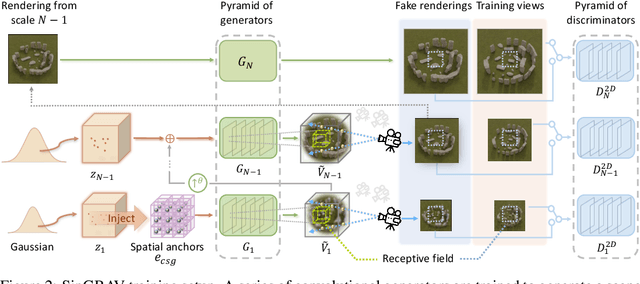
We present a 3D generative model for general natural scenes. Lacking necessary volumes of 3D data characterizing the target scene, we propose to learn from a single scene. Our key insight is that a natural scene often contains multiple constituents whose geometry, texture, and spatial arrangements follow some clear patterns, but still exhibit rich variations over different regions within the same scene. This suggests localizing the learning of a generative model on substantial local regions. Hence, we exploit a multi-scale convolutional network, which possesses the spatial locality bias in nature, to learn from the statistics of local regions at multiple scales within a single scene. In contrast to existing methods, our learning setup bypasses the need to collect data from many homogeneous 3D scenes for learning common features. We coin our method SinGRAV, for learning a Generative RAdiance Volume from a Single natural scene. We demonstrate the ability of SinGRAV in generating plausible and diverse variations from a single scene, the merits of SinGRAV over state-of-the-art generative neural scene methods, as well as the versatility of SinGRAV by its use in a variety of applications, spanning 3D scene editing, composition, and animation. Code and data will be released to facilitate further research.
VAT-Mart: Learning Visual Action Trajectory Proposals for Manipulating 3D ARTiculated Objects
Jun 28, 2021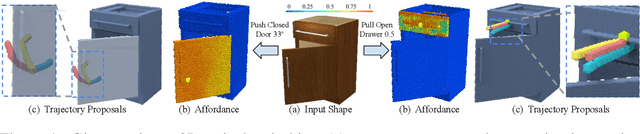



Perceiving and manipulating 3D articulated objects (e.g., cabinets, doors) in human environments is an important yet challenging task for future home-assistant robots. The space of 3D articulated objects is exceptionally rich in their myriad semantic categories, diverse shape geometry, and complicated part functionality. Previous works mostly abstract kinematic structure with estimated joint parameters and part poses as the visual representations for manipulating 3D articulated objects. In this paper, we propose object-centric actionable visual priors as a novel perception-interaction handshaking point that the perception system outputs more actionable guidance than kinematic structure estimation, by predicting dense geometry-aware, interaction-aware, and task-aware visual action affordance and trajectory proposals. We design an interaction-for-perception framework VAT-Mart to learn such actionable visual representations by simultaneously training a curiosity-driven reinforcement learning policy exploring diverse interaction trajectories and a perception module summarizing and generalizing the explored knowledge for pointwise predictions among diverse shapes. Experiments prove the effectiveness of the proposed approach using the large-scale PartNet-Mobility dataset in SAPIEN environment and show promising generalization capabilities to novel test shapes, unseen object categories, and real-world data. Project page: https://hyperplane-lab.github.io/vat-mart
MoCo-Flow: Neural Motion Consensus Flow for Dynamic Humans in Stationary Monocular Cameras
Jun 08, 2021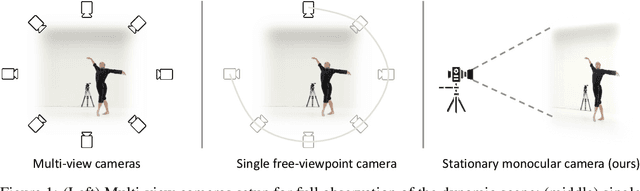

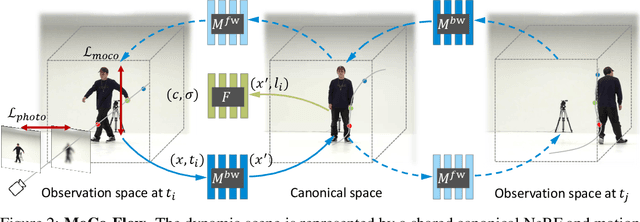

Synthesizing novel views of dynamic humans from stationary monocular cameras is a popular scenario. This is particularly attractive as it does not require static scenes, controlled environments, or specialized hardware. In contrast to techniques that exploit multi-view observations to constrain the modeling, given a single fixed viewpoint only, the problem of modeling the dynamic scene is significantly more under-constrained and ill-posed. In this paper, we introduce Neural Motion Consensus Flow (MoCo-Flow), a representation that models the dynamic scene using a 4D continuous time-variant function. The proposed representation is learned by an optimization which models a dynamic scene that minimizes the error of rendering all observation images. At the heart of our work lies a novel optimization formulation, which is constrained by a motion consensus regularization on the motion flow. We extensively evaluate MoCo-Flow on several datasets that contain human motions of varying complexity, and compare, both qualitatively and quantitatively, to several baseline methods and variants of our methods. Pretrained model, code, and data will be released for research purposes upon paper acceptance.