 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLior Shani
Demystifying Embedding Spaces using Large Language Models
Oct 06, 2023
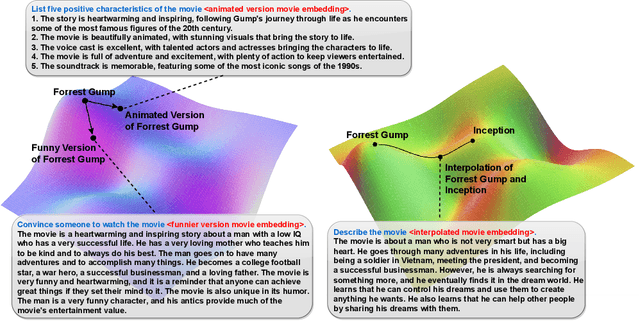
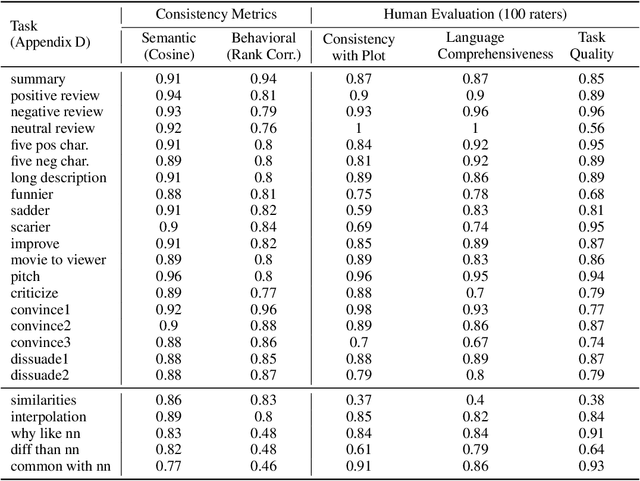
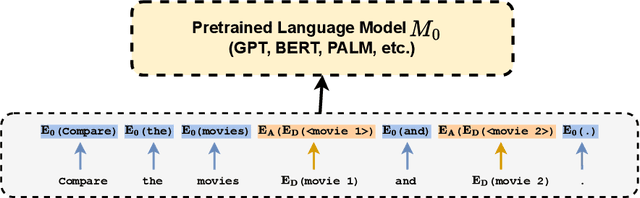
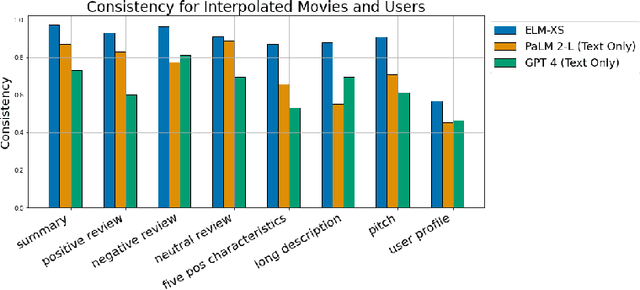
Embeddings have become a pivotal means to represent complex, multi-faceted information about entities, concepts, and relationships in a condensed and useful format. Nevertheless, they often preclude direct interpretation. While downstream tasks make use of these compressed representations, meaningful interpretation usually requires visualization using dimensionality reduction or specialized machine learning interpretability methods. This paper addresses the challenge of making such embeddings more interpretable and broadly useful, by employing Large Language Models (LLMs) to directly interact with embeddings -- transforming abstract vectors into understandable narratives. By injecting embeddings into LLMs, we enable querying and exploration of complex embedding data. We demonstrate our approach on a variety of diverse tasks, including: enhancing concept activation vectors (CAVs), communicating novel embedded entities, and decoding user preferences in recommender systems. Our work couples the immense information potential of embeddings with the interpretative power of LLMs.
Factually Consistent Summarization via Reinforcement Learning with Textual Entailment Feedback
May 31, 2023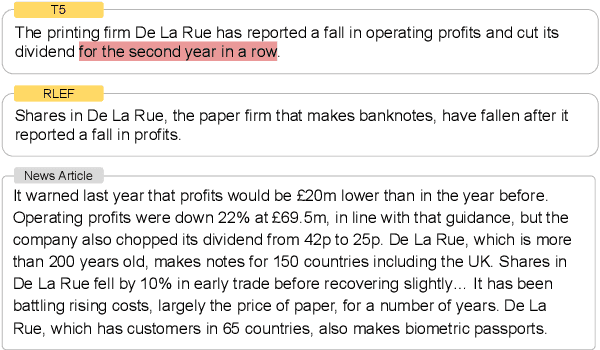
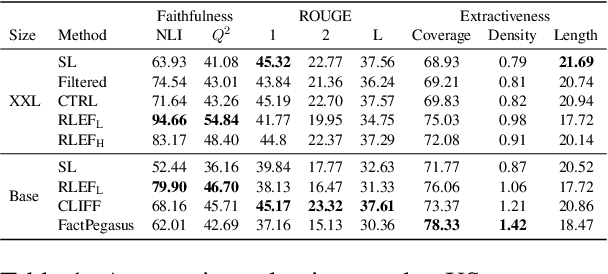
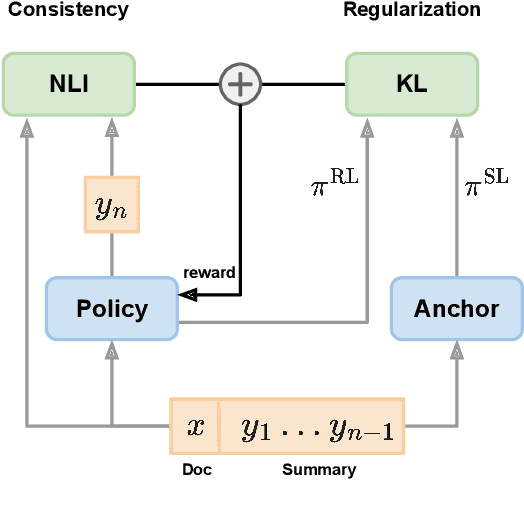
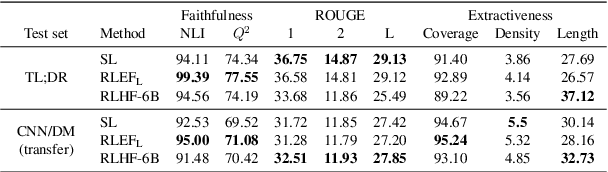
Despite the seeming success of contemporary grounded text generation systems, they often tend to generate factually inconsistent text with respect to their input. This phenomenon is emphasized in tasks like summarization, in which the generated summaries should be corroborated by their source article. In this work, we leverage recent progress on textual entailment models to directly address this problem for abstractive summarization systems. We use reinforcement learning with reference-free, textual entailment rewards to optimize for factual consistency and explore the ensuing trade-offs, as improved consistency may come at the cost of less informative or more extractive summaries. Our results, according to both automatic metrics and human evaluation, show that our method considerably improves the faithfulness, salience, and conciseness of the generated summaries.
Reinforcement Learning with History-Dependent Dynamic Contexts
Feb 04, 2023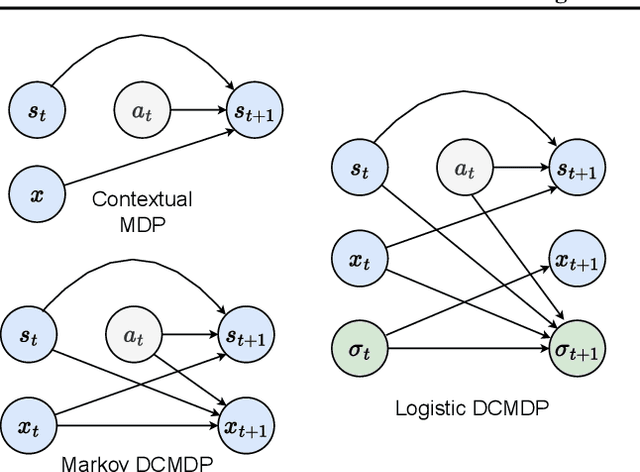
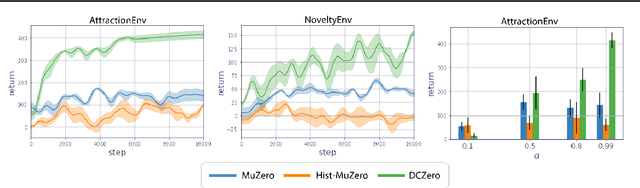
We introduce Dynamic Contextual Markov Decision Processes (DCMDPs), a novel reinforcement learning framework for history-dependent environments that generalizes the contextual MDP framework to handle non-Markov environments, where contexts change over time. We consider special cases of the model, with a focus on logistic DCMDPs, which break the exponential dependence on history length by leveraging aggregation functions to determine context transitions. This special structure allows us to derive an upper-confidence-bound style algorithm for which we establish regret bounds. Motivated by our theoretical results, we introduce a practical model-based algorithm for logistic DCMDPs that plans in a latent space and uses optimism over history-dependent features. We demonstrate the efficacy of our approach on a recommendation task (using MovieLens data) where user behavior dynamics evolve in response to recommendations.
Reinforcement Learning with a Terminator
May 30, 2022



We present the problem of reinforcement learning with exogenous termination. We define the Termination Markov Decision Process (TerMDP), an extension of the MDP framework, in which episodes may be interrupted by an external non-Markovian observer. This formulation accounts for numerous real-world situations, such as a human interrupting an autonomous driving agent for reasons of discomfort. We learn the parameters of the TerMDP and leverage the structure of the estimation problem to provide state-wise confidence bounds. We use these to construct a provably-efficient algorithm, which accounts for termination, and bound its regret. Motivated by our theoretical analysis, we design and implement a scalable approach, which combines optimism (w.r.t. termination) and a dynamic discount factor, incorporating the termination probability. We deploy our method on high-dimensional driving and MinAtar benchmarks. Additionally, we test our approach on human data in a driving setting. Our results demonstrate fast convergence and significant improvement over various baseline approaches.
Online Apprenticeship Learning
Feb 13, 2021



In Apprenticeship Learning (AL), we are given a Markov Decision Process (MDP) without access to the cost function. Instead, we observe trajectories sampled by an expert that acts according to some policy. The goal is to find a policy that matches the expert's performance on some predefined set of cost functions. We introduce an online variant of AL (Online Apprenticeship Learning; OAL), where the agent is expected to perform comparably to the expert while interacting with the environment. We show that the OAL problem can be effectively solved by combining two mirror descent based no-regret algorithms: one for policy optimization and another for learning the worst case cost. To this end, we derive a convergent algorithm with $O(\sqrt{K})$ regret, where $K$ is the number of interactions with the MDP, and an additional linear error term that depends on the amount of expert trajectories available. Importantly, our algorithm avoids the need to solve an MDP at each iteration, making it more practical compared to prior AL methods. Finally, we implement a deep variant of our algorithm which shares some similarities to GAIL \cite{ho2016generative}, but where the discriminator is replaced with the costs learned by the OAL problem. Our simulations demonstrate our theoretically grounded approach outperforms the baselines.
Mirror Descent Policy Optimization
Jun 09, 2020



We propose deep Reinforcement Learning (RL) algorithms inspired by mirror descent, a well-known first-order trust region optimization method for solving constrained convex problems. Our approach, which we call as Mirror Descent Policy Optimization (MDPO), is based on the idea of iteratively solving a `trust-region' problem that minimizes a sum of two terms: a linearization of the objective function and a proximity term that restricts two consecutive updates to be close to each other. Following this approach we derive on-policy and off-policy variants of the MDPO algorithm and analyze their performance while emphasizing important implementation details, motivated by the existing theoretical framework. We highlight the connections between on-policy MDPO and two popular trust region RL algorithms: TRPO and PPO, and conduct a comprehensive empirical comparison of these algorithms. We then derive off-policy MDPO and compare its performance to existing approaches. Importantly, we show that the theoretical framework of MDPO can be scaled to deep RL while achieving good performance on popular benchmarks.
Optimistic Policy Optimization with Bandit Feedback
Feb 19, 2020
Policy optimization methods are one of the most widely used classes of Reinforcement Learning (RL) algorithms. Yet, so far, such methods have been mostly analyzed from an optimization perspective, without addressing the problem of exploration, or by making strong assumptions on the interaction with the environment. In this paper we consider model-based RL in the tabular finite-horizon MDP setting with unknown transitions and bandit feedback. For this setting, we propose an optimistic trust region policy optimization (TRPO) algorithm for which we establish $\tilde O(\sqrt{S^2 A H^4 K})$ regret for stochastic rewards. Furthermore, we prove $\tilde O( \sqrt{ S^2 A H^4 } K^{2/3} ) $ regret for adversarial rewards. Interestingly, this result matches previous bounds derived for the bandit feedback case, yet with known transitions. To the best of our knowledge, the two results are the first sub-linear regret bounds obtained for policy optimization algorithms with unknown transitions and bandit feedback.
Adaptive Trust Region Policy Optimization: Global Convergence and Faster Rates for Regularized MDPs
Sep 06, 2019

Trust region policy optimization (TRPO) is a popular and empirically successful policy search algorithm in Reinforcement Learning (RL) in which a surrogate problem, that restricts consecutive policies to be `close' to one another, is iteratively solved. Nevertheless, TRPO has been considered a heuristic algorithm inspired by Conservative Policy Iteration (CPI). We show that the adaptive scaling mechanism used in TRPO is in fact the natural "RL version" of traditional trust-region methods from convex analysis. We first analyze TRPO in the planning setting, in which we have access to the model and the entire state space. Then, we consider sample-based TRPO and establish $\tilde O(1/\sqrt{N})$ convergence rate to the global optimum. Importantly, the adaptive scaling mechanism allows us to analyze TRPO in {\em regularized MDPs} for which we prove fast rates of $\tilde O(1/N)$, much like results in convex optimization. This is the first result in RL of better rates when regularizing the instantaneous cost or reward.
Multi Instance Learning For Unbalanced Data
Dec 17, 2018
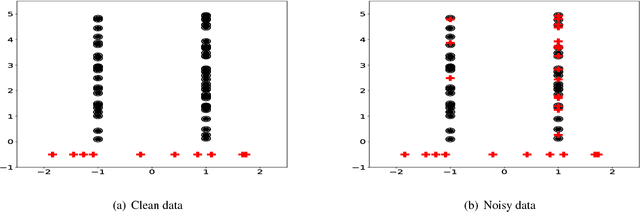
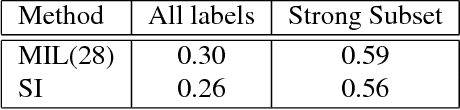
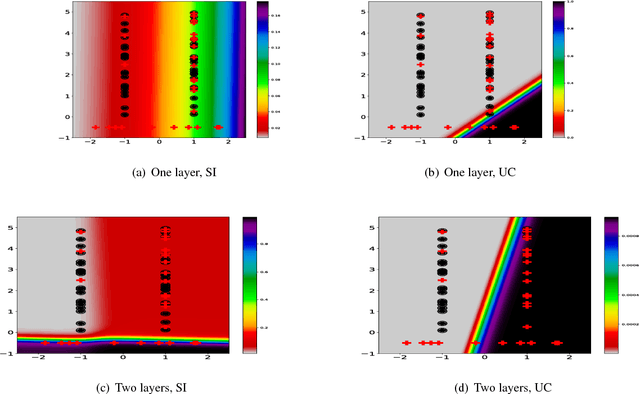
In the context of Multi Instance Learning, we analyze the Single Instance (SI) learning objective. We show that when the data is unbalanced and the family of classifiers is sufficiently rich, the SI method is a useful learning algorithm. In particular, we show that larger data imbalance, a quality that is typically perceived as negative, in fact implies a better resilience of the algorithm to the statistical dependencies of the objects in bags. In addition, our results shed new light on some known issues with the SI method in the setting of linear classifiers, and we show that these issues are significantly less likely to occur in the setting of neural networks. We demonstrate our results on a synthetic dataset, and on the COCO dataset for the problem of patch classification with weak image level labels derived from captions.
Revisiting Exploration-Conscious Reinforcement Learning
Dec 13, 2018



The objective of Reinforcement Learning is to learn an optimal policy by performing actions and observing their long term consequences. Unfortunately, acquiring such a policy can be a hard task. More severely, since one cannot tell if a policy is optimal, there is a constant need for exploration. This is known as the Exploration-Exploitation trade-off. In practice, this trade-off is resolved by using some inherent exploration mechanism, such as the $\epsilon$-greedy exploration, while still trying to learn the optimal policy. In this work, we take a different approach. We define a surrogate optimality objective: an optimal policy with respect to the exploration scheme. As we show throughout the paper, although solving this criterion does not necessarily lead to an optimal policy, the problem becomes easier to solve. We continue by analyzing this notion of optimality, devise algorithms derived from this approach, which reveal connections to existing work, and test them empirically on tabular and deep Reinforcement Learning domains.