 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYuantao Chen
Blending Distributed NeRFs with Tri-stage Robust Pose Optimization
May 05, 2024
Due to the limited model capacity, leveraging distributed Neural Radiance Fields (NeRFs) for modeling extensive urban environments has become a necessity. However, current distributed NeRF registration approaches encounter aliasing artifacts, arising from discrepancies in rendering resolutions and suboptimal pose precision. These factors collectively deteriorate the fidelity of pose estimation within NeRF frameworks, resulting in occlusion artifacts during the NeRF blending stage. In this paper, we present a distributed NeRF system with tri-stage pose optimization. In the first stage, precise poses of images are achieved by bundle adjusting Mip-NeRF 360 with a coarse-to-fine strategy. In the second stage, we incorporate the inverting Mip-NeRF 360, coupled with the truncated dynamic low-pass filter, to enable the achievement of robust and precise poses, termed Frame2Model optimization. On top of this, we obtain a coarse transformation between NeRFs in different coordinate systems. In the third stage, we fine-tune the transformation between NeRFs by Model2Model pose optimization. After obtaining precise transformation parameters, we proceed to implement NeRF blending, showcasing superior performance metrics in both real-world and simulation scenarios. Codes and data will be publicly available at https://github.com/boilcy/Distributed-NeRF.
Spectrally Pruned Gaussian Fields with Neural Compensation
May 01, 2024Recently, 3D Gaussian Splatting, as a novel 3D representation, has garnered attention for its fast rendering speed and high rendering quality. However, this comes with high memory consumption, e.g., a well-trained Gaussian field may utilize three million Gaussian primitives and over 700 MB of memory. We credit this high memory footprint to the lack of consideration for the relationship between primitives. In this paper, we propose a memory-efficient Gaussian field named SUNDAE with spectral pruning and neural compensation. On one hand, we construct a graph on the set of Gaussian primitives to model their relationship and design a spectral down-sampling module to prune out primitives while preserving desired signals. On the other hand, to compensate for the quality loss of pruning Gaussians, we exploit a lightweight neural network head to mix splatted features, which effectively compensates for quality losses while capturing the relationship between primitives in its weights. We demonstrate the performance of SUNDAE with extensive results. For example, SUNDAE can achieve 26.80 PSNR at 145 FPS using 104 MB memory while the vanilla Gaussian splatting algorithm achieves 25.60 PSNR at 160 FPS using 523 MB memory, on the Mip-NeRF360 dataset. Codes are publicly available at https://runyiyang.github.io/projects/SUNDAE/.
GauStudio: A Modular Framework for 3D Gaussian Splatting and Beyond
Mar 28, 2024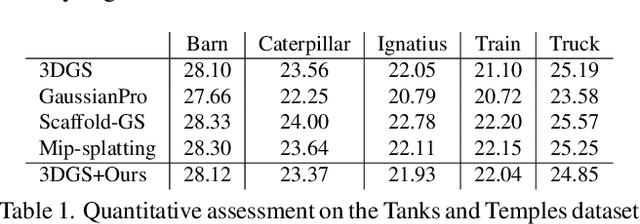
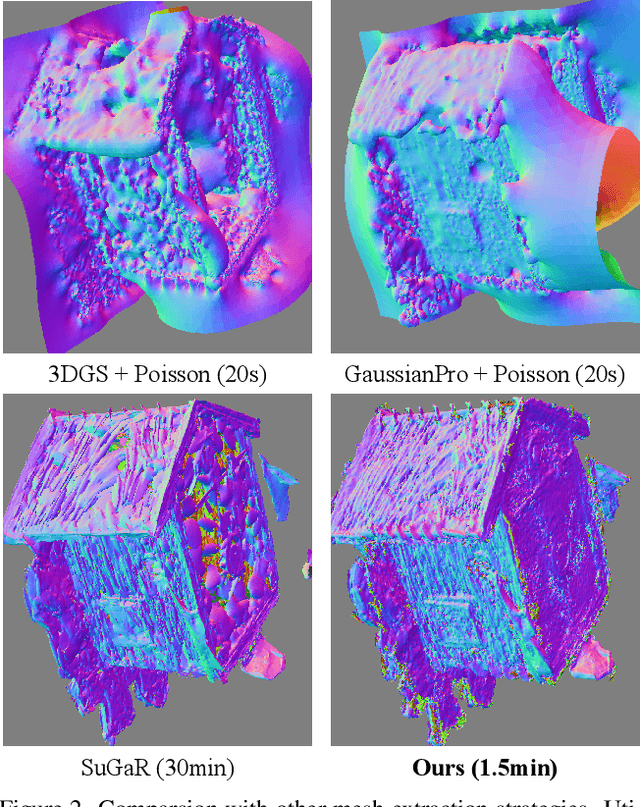
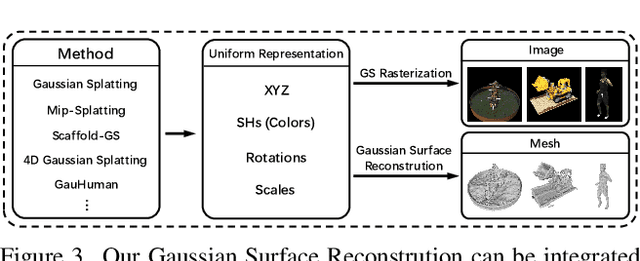
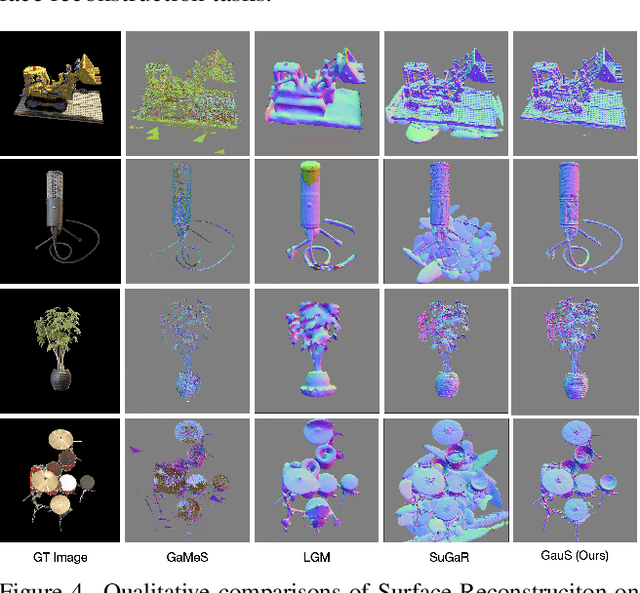
We present GauStudio, a novel modular framework for modeling 3D Gaussian Splatting (3DGS) to provide standardized, plug-and-play components for users to easily customize and implement a 3DGS pipeline. Supported by our framework, we propose a hybrid Gaussian representation with foreground and skyball background models. Experiments demonstrate this representation reduces artifacts in unbounded outdoor scenes and improves novel view synthesis. Finally, we propose Gaussian Splatting Surface Reconstruction (GauS), a novel render-then-fuse approach for high-fidelity mesh reconstruction from 3DGS inputs without fine-tuning. Overall, our GauStudio framework, hybrid representation, and GauS approach enhance 3DGS modeling and rendering capabilities, enabling higher-quality novel view synthesis and surface reconstruction.
MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving
Jul 27, 2023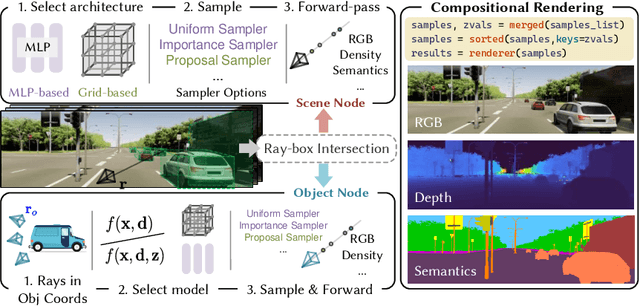
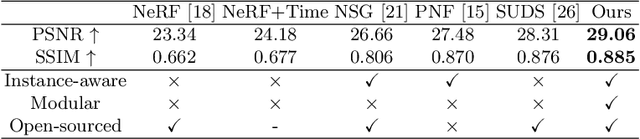
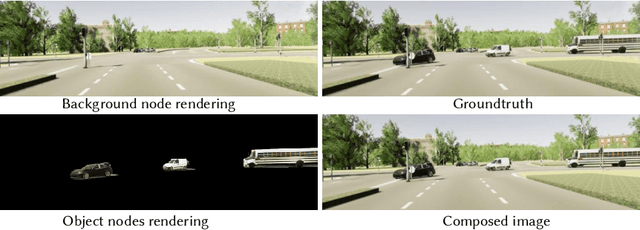
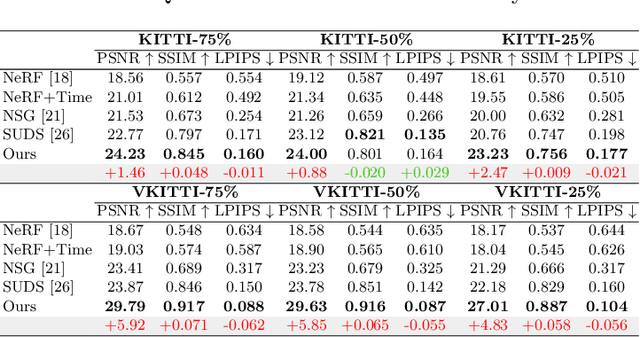
Nowadays, autonomous cars can drive smoothly in ordinary cases, and it is widely recognized that realistic sensor simulation will play a critical role in solving remaining corner cases by simulating them. To this end, we propose an autonomous driving simulator based upon neural radiance fields (NeRFs). Compared with existing works, ours has three notable features: (1) Instance-aware. Our simulator models the foreground instances and background environments separately with independent networks so that the static (e.g., size and appearance) and dynamic (e.g., trajectory) properties of instances can be controlled separately. (2) Modular. Our simulator allows flexible switching between different modern NeRF-related backbones, sampling strategies, input modalities, etc. We expect this modular design to boost academic progress and industrial deployment of NeRF-based autonomous driving simulation. (3) Realistic. Our simulator set new state-of-the-art photo-realism results given the best module selection. Our simulator will be open-sourced while most of our counterparts are not. Project page: https://open-air-sun.github.io/mars/.
AsyncNeRF: Learning Large-scale Radiance Fields from Asynchronous RGB-D Sequences with Time-Pose Function
Nov 14, 2022



Large-scale radiance fields are promising mapping tools for smart transportation applications like autonomous driving or drone delivery. But for large-scale scenes, compact synchronized RGB-D cameras are not applicable due to limited sensing range, and using separate RGB and depth sensors inevitably leads to unsynchronized sequences. Inspired by the recent success of self-calibrating radiance field training methods that do not require known intrinsic or extrinsic parameters, we propose the first solution that self-calibrates the mismatch between RGB and depth frames. We leverage the important domain-specific fact that RGB and depth frames are actually sampled from the same trajectory and develop a novel implicit network called the time-pose function. Combining it with a large-scale radiance field leads to an architecture that cascades two implicit representation networks. To validate its effectiveness, we construct a diverse and photorealistic dataset that covers various RGB-D mismatch scenarios. Through a comprehensive benchmarking on this dataset, we demonstrate the flexibility of our method in different scenarios and superior performance over applicable prior counterparts. Codes, data, and models will be made publicly available.
LATITUDE: Robotic Global Localization with Truncated Dynamic Low-pass Filter in City-scale NeRF
Sep 18, 2022



Neural Radiance Fields (NeRFs) have made great success in representing complex 3D scenes with high-resolution details and efficient memory. Nevertheless, current NeRF-based pose estimators have no initial pose prediction and are prone to local optima during optimization. In this paper, we present LATITUDE: Global Localization with Truncated Dynamic Low-pass Filter, which introduces a two-stage localization mechanism in city-scale NeRF. In place recognition stage, we train a regressor through images generated from trained NeRFs, which provides an initial value for global localization. In pose optimization stage, we minimize the residual between the observed image and rendered image by directly optimizing the pose on tangent plane. To avoid convergence to local optimum, we introduce a Truncated Dynamic Low-pass Filter (TDLF) for coarse-to-fine pose registration. We evaluate our method on both synthetic and real-world data and show its potential applications for high-precision navigation in large-scale city scenes. Codes and data will be publicly available at https://github.com/jike5/LATITUDE.