 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOliver Kroemer
Leveraging Simulation-Based Model Preconditions for Fast Action Parameter Optimization with Multiple Models
Mar 17, 2024

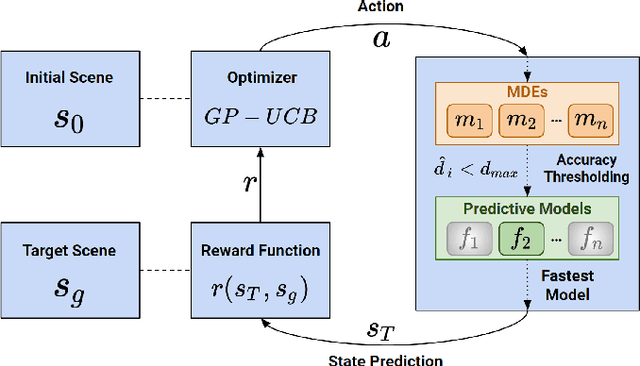
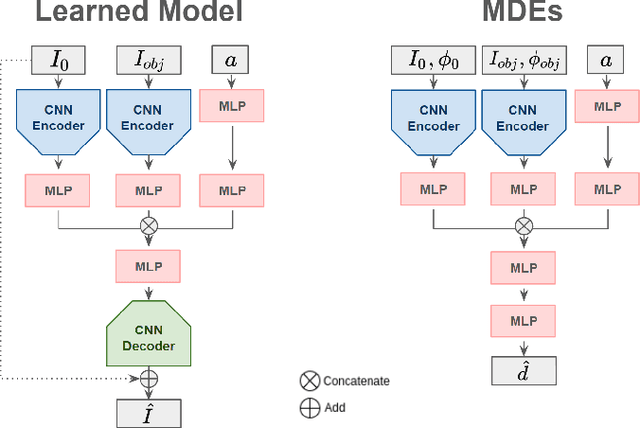
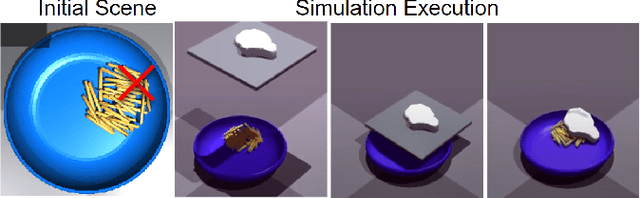
Optimizing robotic action parameters is a significant challenge for manipulation tasks that demand high levels of precision and generalization. Using a model-based approach, the robot must quickly reason about the outcomes of different actions using a predictive model to find a set of parameters that will have the desired effect. The model may need to capture the behaviors of rigid and deformable objects, as well as objects of various shapes and sizes. Predictive models often need to trade-off speed for prediction accuracy and generalization. This paper proposes a framework that leverages the strengths of multiple predictive models, including analytical, learned, and simulation-based models, to enhance the efficiency and accuracy of action parameter optimization. Our approach uses Model Deviation Estimators (MDEs) to determine the most suitable predictive model for any given state-action parameters, allowing the robot to select models to make fast and precise predictions. We extend the MDE framework by not only learning sim-to-real MDEs, but also sim-to-sim MDEs. Our experiments show that these sim-to-sim MDEs provide significantly faster parameter optimization as well as a basis for efficiently learning sim-to-real MDEs through finetuning. The ease of collecting sim-to-sim training data also allows the robot to learn MDEs based directly on visual inputs and local material properties.
Hefty: A Modular Reconfigurable Robot for Advancing Robot Manipulation in Agriculture
Feb 28, 2024This paper presents a modular, reconfigurable robot platform for robot manipulation in agriculture. While robot manipulation promises great advancements in automating challenging, complex tasks that are currently best left to humans, it is also an expensive capital investment for researchers and users because it demands significantly varying robot configurations depending on the task. Modular robots provide a way to obtain multiple configurations and reduce costs by enabling incremental acquisition of only the necessary modules. The robot we present, Hefty, is designed to be modular and reconfigurable. It is designed for both researchers and end-users as a means to improve technology transfer from research to real-world application. This paper provides a detailed design and integration process, outlining the critical design decisions that enable modularity in the mobility of the robot as well as its sensor payload, power systems, computing, and fixture mounting. We demonstrate the utility of the robot by presenting five configurations used in multiple real-world agricultural robotics applications.
MResT: Multi-Resolution Sensing for Real-Time Control with Vision-Language Models
Jan 25, 2024Leveraging sensing modalities across diverse spatial and temporal resolutions can improve performance of robotic manipulation tasks. Multi-spatial resolution sensing provides hierarchical information captured at different spatial scales and enables both coarse and precise motions. Simultaneously multi-temporal resolution sensing enables the agent to exhibit high reactivity and real-time control. In this work, we propose a framework, MResT (Multi-Resolution Transformer), for learning generalizable language-conditioned multi-task policies that utilize sensing at different spatial and temporal resolutions using networks of varying capacities to effectively perform real time control of precise and reactive tasks. We leverage off-the-shelf pretrained vision-language models to operate on low-frequency global features along with small non-pretrained models to adapt to high frequency local feedback. Through extensive experiments in 3 domains (coarse, precise and dynamic manipulation tasks), we show that our approach significantly improves (2X on average) over recent multi-task baselines. Further, our approach generalizes well to visual and geometric variations in target objects and to varying interaction forces.
Task-Oriented Active Learning of Model Preconditions for Inaccurate Dynamics Models
Jan 08, 2024When planning with an inaccurate dynamics model, a practical strategy is to restrict planning to regions of state-action space where the model is accurate: also known as a model precondition. Empirical real-world trajectory data is valuable for defining data-driven model preconditions regardless of the model form (analytical, simulator, learned, etc...). However, real-world data is often expensive and dangerous to collect. In order to achieve data efficiency, this paper presents an algorithm for actively selecting trajectories to learn a model precondition for an inaccurate pre-specified dynamics model. Our proposed techniques address challenges arising from the sequential nature of trajectories, and potential benefit of prioritizing task-relevant data. The experimental analysis shows how algorithmic properties affect performance in three planning scenarios: icy gridworld, simulated plant watering, and real-world plant watering. Results demonstrate an improvement of approximately 80% after only four real-world trajectories when using our proposed techniques.
Towards Robotic Tree Manipulation: Leveraging Graph Representations
Nov 13, 2023There is growing interest in automating agricultural tasks that require intricate and precise interaction with specialty crops, such as trees and vines. However, developing robotic solutions for crop manipulation remains a difficult challenge due to complexities involved in modeling their deformable behavior. In this study, we present a framework for learning the deformation behavior of tree-like crops under contact interaction. Our proposed method involves encoding the state of a spring-damper modeled tree crop as a graph. This representation allows us to employ graph networks to learn both a forward model for predicting resulting deformations, and a contact policy for inferring actions to manipulate tree crops. We conduct a comprehensive set of experiments in a simulated environment and demonstrate generalizability of our method on previously unseen trees. Videos can be found on the project website: https://kantor-lab.github.io/tree_gnn
Towards Autonomous Crop Monitoring: Inserting Sensors in Cluttered Environments
Nov 07, 2023We present a contact-based phenotyping robot platform that can autonomously insert nitrate sensors into cornstalks to proactively monitor macronutrient levels in crops. This task is challenging because inserting such sensors requires sub-centimeter precision in an environment which contains high levels of clutter, lighting variation, and occlusion. To address these challenges, we develop a robust perception-action pipeline to detect and grasp stalks, and create a custom robot gripper which mechanically aligns the sensor before inserting it into the stalk. Through experimental validation on 48 unique stalks in a cornfield in Iowa, we demonstrate our platform's capability of detecting a stalk with 94% success, grasping a stalk with 90% success, and inserting a sensor with 60% success. In addition to developing an autonomous phenotyping research platform, we share key challenges and insights obtained from deployment in the field. Our research platform is open-sourced, with additional information available at https://kantor-lab.github.io/cornbot.
Estimating Material Properties of Interacting Objects Using Sum-GP-UCB
Oct 18, 2023



Robots need to estimate the material and dynamic properties of objects from observations in order to simulate them accurately. We present a Bayesian optimization approach to identifying the material property parameters of objects based on a set of observations. Our focus is on estimating these properties based on observations of scenes with different sets of interacting objects. We propose an approach that exploits the structure of the reward function by modeling the reward for each observation separately and using only the parameters of the objects in that scene as inputs. The resulting lower-dimensional models generalize better over the parameter space, which in turn results in a faster optimization. To speed up the optimization process further, and reduce the number of simulation runs needed to find good parameter values, we also propose partial evaluations of the reward function, wherein the selected parameters are only evaluated on a subset of real world evaluations. The approach was successfully evaluated on a set of scenes with a wide range of object interactions, and we showed that our method can effectively perform incremental learning without resetting the rewards of the gathered observations.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023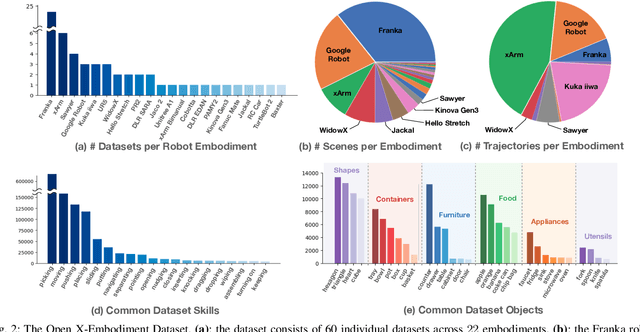
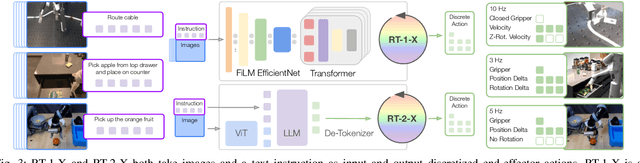
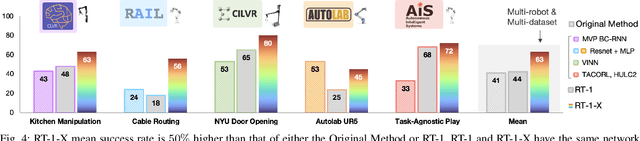
Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
DELTAHANDS: A Synergistic Dexterous Hand Framework Based on Delta Robots
Oct 08, 2023Dexterous robotic manipulation in unstructured environments can aid in everyday tasks such as cleaning and caretaking. Anthropomorphic robotic hands are highly dexterous and theoretically well-suited for working in human domains, but their complex designs and dynamics often make them difficult to control. By contrast, parallel-jaw grippers are easy to control and are used extensively in industrial applications, but they lack the dexterity for various kinds of grasps and in-hand manipulations. In this work, we present DELTAHANDS, a synergistic dexterous hand framework with Delta robots. The DELTAHANDS are soft, easy to reconfigure, simple to manufacture with low-cost off-the-shelf materials, and possess high degrees of freedom that can be easily controlled. DELTAHANDS' dexterity can be adjusted for different applications by leveraging actuation synergies, which can further reduce the control complexity, overall cost, and energy consumption. We characterize the Delta robots' kinematics accuracy, force profiles, and workspace range to assist with hand design. Finally, we evaluate the versatility of DELTAHANDS by grasping a diverse set of objects and by using teleoperation to complete three dexterous manipulation tasks: cloth folding, cap opening, and cable arrangement.
Enhancing Dexterity in Robotic Manipulation via Hierarchical Contact Exploration
Jul 01, 2023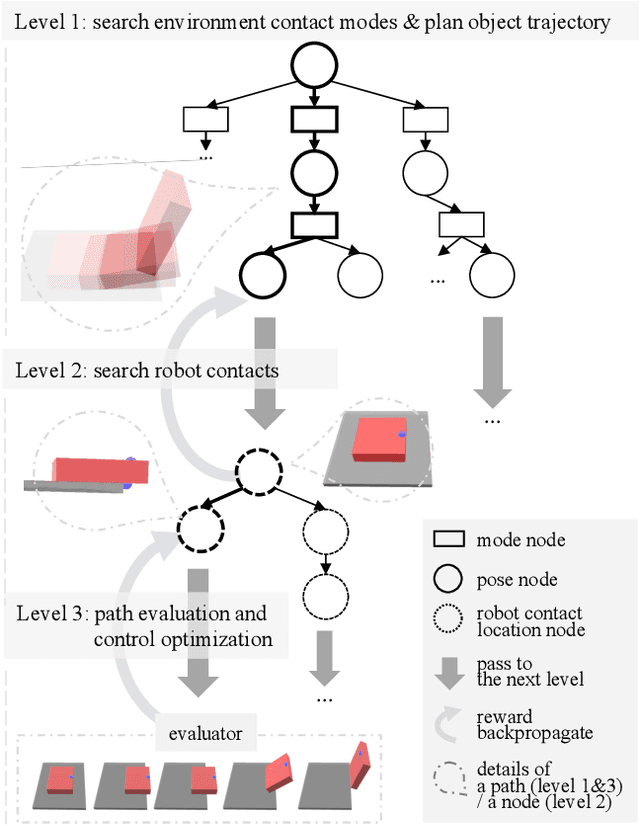

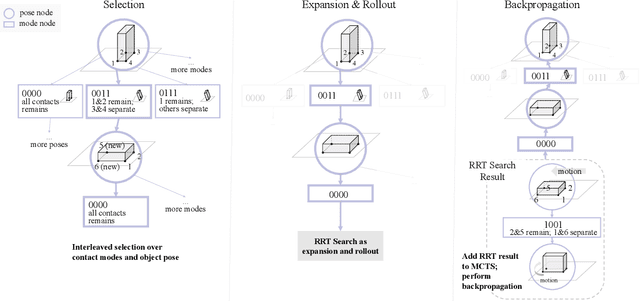
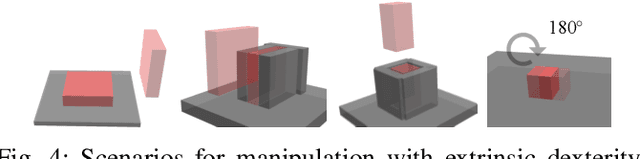
We present a hierarchical planning framework for dexterous robotic manipulation (HiDex). This framework exploits in-hand and extrinsic dexterity by actively exploring contacts. It generates rigid-body motions and complex contact sequences. Our framework is based on Monte-Carlo Tree Search (MCTS) and has three levels: 1) planning object motions and environment contact modes; 2) planning robot contacts; 3) path evaluation and control optimization that passes the rewards to the upper levels. This framework offers two main advantages. First, it allows efficient global reasoning over high-dimensional complex space created by contacts. It solves a diverse set of manipulation tasks that require dexterity, both intrinsic (using the fingers) and extrinsic (also using the environment), mostly in seconds. Second, our framework allows the incorporation of expert knowledge and customizable setups in task mechanics and models. It requires minor modifications to accommodate different scenarios and robots. Hence, it could provide a flexible and generalizable solution for various manipulation tasks. As examples, we analyze the results on 7 hand configurations and 15 scenarios. We demonstrate 8 of them on two robot platforms.