 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTed Xiao
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024
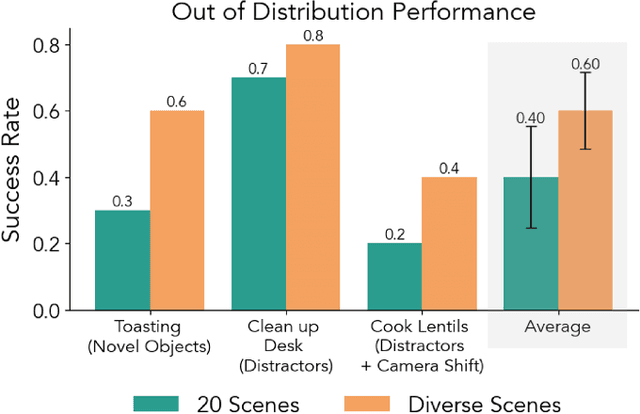
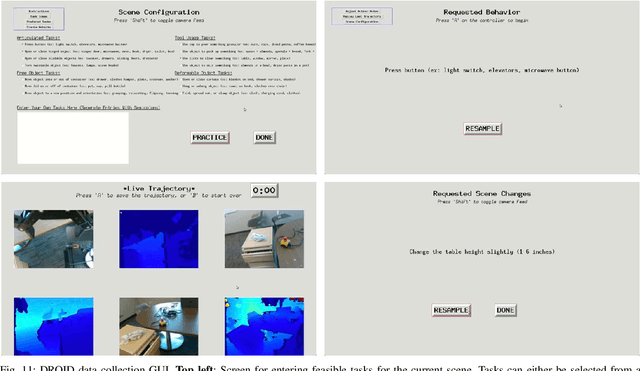
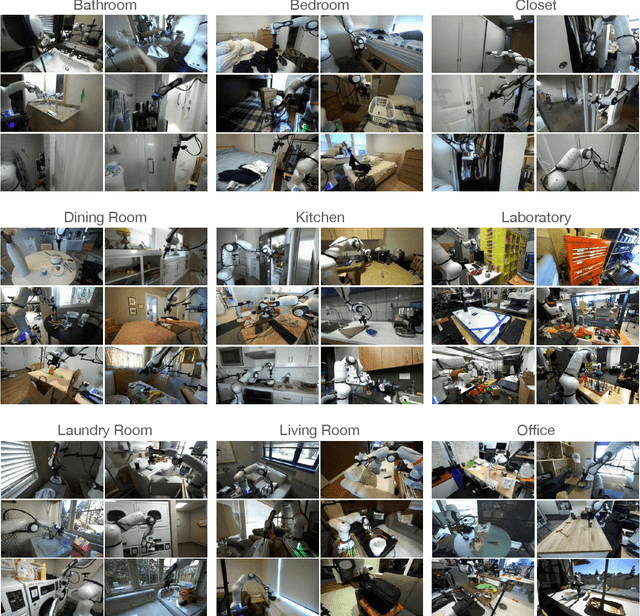
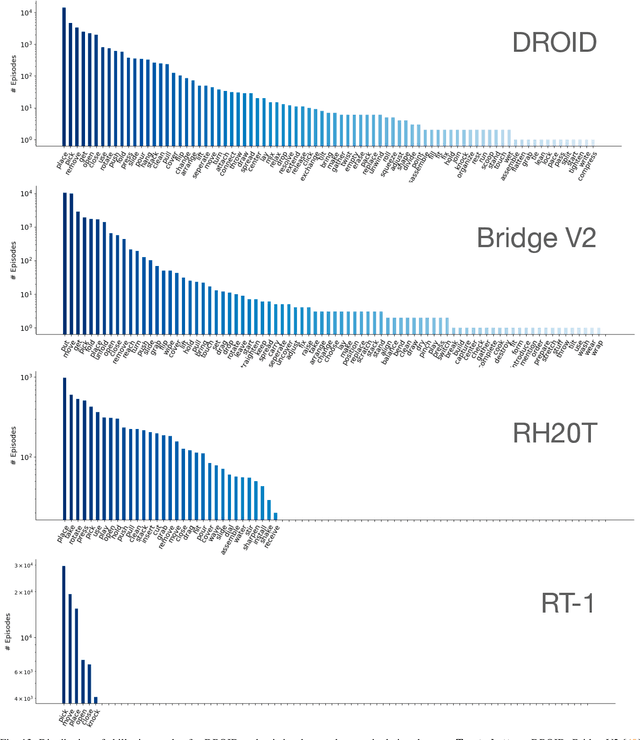
The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
Efficient Data Collection for Robotic Manipulation via Compositional Generalization
Mar 08, 2024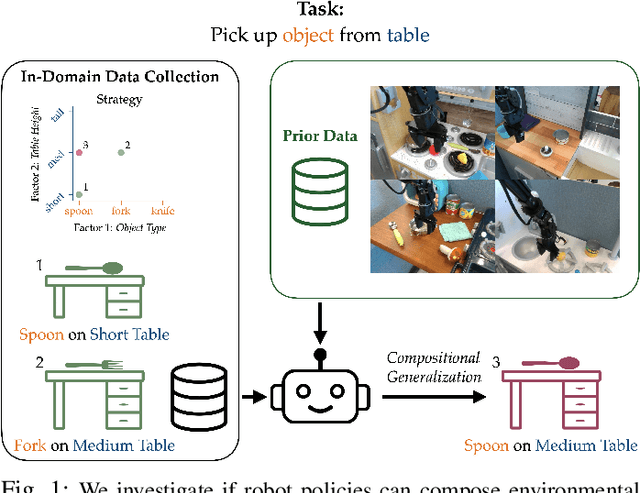
Data collection has become an increasingly important problem in robotic manipulation, yet there still lacks much understanding of how to effectively collect data to facilitate broad generalization. Recent works on large-scale robotic data collection typically vary a wide range of environmental factors during data collection, such as object types and table textures. While these works attempt to cover a diverse variety of scenarios, they do not explicitly account for the possible compositional abilities of policies trained on the data. If robot policies are able to compose different environmental factors of variation (e.g., object types, table heights) from their training data to succeed when encountering unseen factor combinations, then we can exploit this to avoid collecting data for situations that composition would address. To investigate this possibility, we conduct thorough empirical studies both in simulation and on a real robot that compare data collection strategies and assess whether visual imitation learning policies can compose environmental factors. We find that policies do exhibit composition, although leveraging prior robotic datasets is critical for this on a real robot. We use these insights to provide better practices for in-domain data collection by proposing data collection strategies that exploit composition, which can induce better generalization than naive approaches for the same amount of effort during data collection. We further demonstrate that a real robot policy trained on data from such a strategy achieves a success rate of 77.5% when transferred to entirely new environments that encompass unseen combinations of environmental factors, whereas policies trained using data collected without accounting for environmental variation fail to transfer effectively, with a success rate of only 2.5%. We provide videos at http://iliad.stanford.edu/robot-data-comp/.
Stop Regressing: Training Value Functions via Classification for Scalable Deep RL
Mar 06, 2024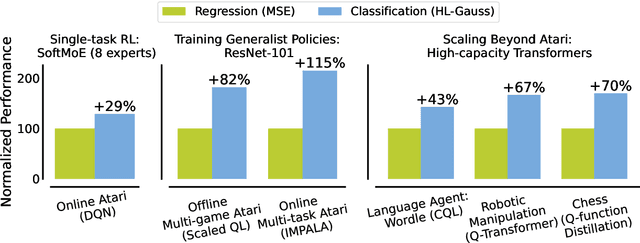
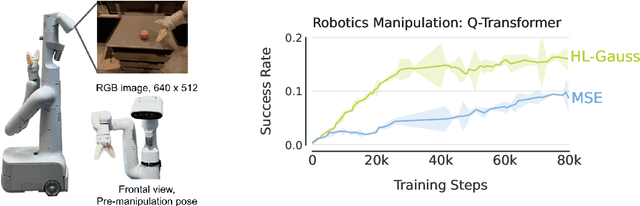
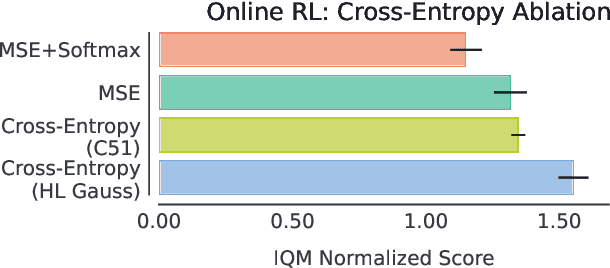
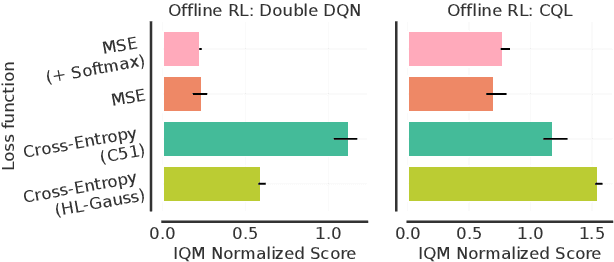
Value functions are a central component of deep reinforcement learning (RL). These functions, parameterized by neural networks, are trained using a mean squared error regression objective to match bootstrapped target values. However, scaling value-based RL methods that use regression to large networks, such as high-capacity Transformers, has proven challenging. This difficulty is in stark contrast to supervised learning: by leveraging a cross-entropy classification loss, supervised methods have scaled reliably to massive networks. Observing this discrepancy, in this paper, we investigate whether the scalability of deep RL can also be improved simply by using classification in place of regression for training value functions. We demonstrate that value functions trained with categorical cross-entropy significantly improves performance and scalability in a variety of domains. These include: single-task RL on Atari 2600 games with SoftMoEs, multi-task RL on Atari with large-scale ResNets, robotic manipulation with Q-transformers, playing Chess without search, and a language-agent Wordle task with high-capacity Transformers, achieving state-of-the-art results on these domains. Through careful analysis, we show that the benefits of categorical cross-entropy primarily stem from its ability to mitigate issues inherent to value-based RL, such as noisy targets and non-stationarity. Overall, we argue that a simple shift to training value functions with categorical cross-entropy can yield substantial improvements in the scalability of deep RL at little-to-no cost.
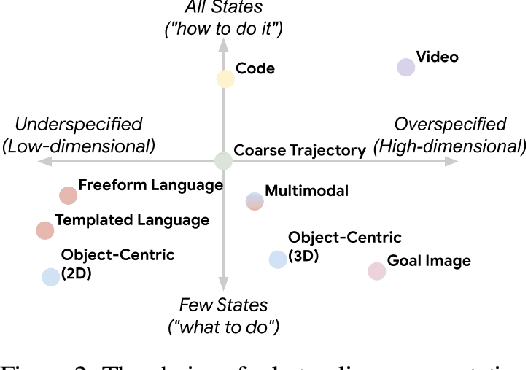
RT-Sketch: Goal-Conditioned Imitation Learning from Hand-Drawn Sketches
Mar 05, 2024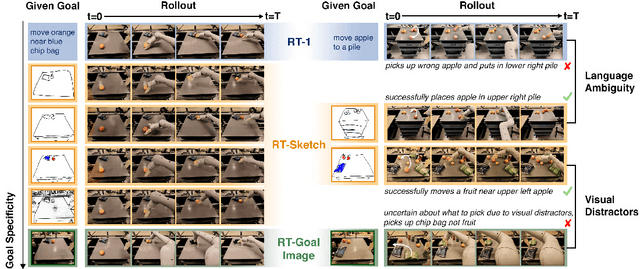
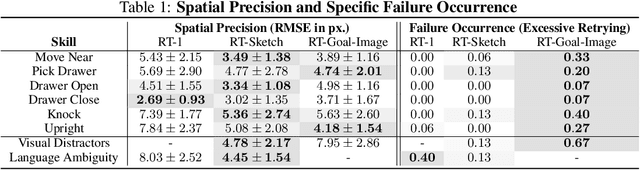
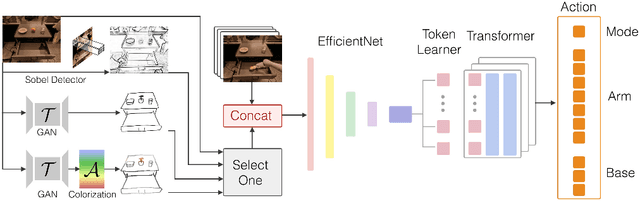
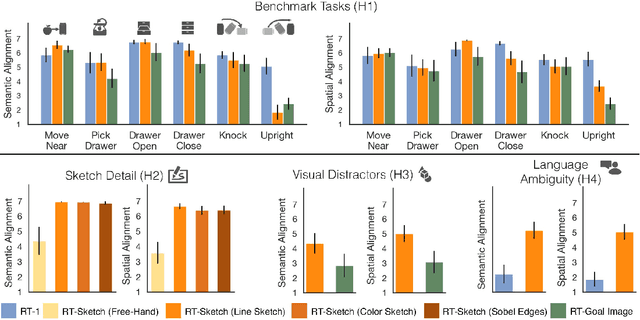
Natural language and images are commonly used as goal representations in goal-conditioned imitation learning (IL). However, natural language can be ambiguous and images can be over-specified. In this work, we propose hand-drawn sketches as a modality for goal specification in visual imitation learning. Sketches are easy for users to provide on the fly like language, but similar to images they can also help a downstream policy to be spatially-aware and even go beyond images to disambiguate task-relevant from task-irrelevant objects. We present RT-Sketch, a goal-conditioned policy for manipulation that takes a hand-drawn sketch of the desired scene as input, and outputs actions. We train RT-Sketch on a dataset of paired trajectories and corresponding synthetically generated goal sketches. We evaluate this approach on six manipulation skills involving tabletop object rearrangements on an articulated countertop. Experimentally we find that RT-Sketch is able to perform on a similar level to image or language-conditioned agents in straightforward settings, while achieving greater robustness when language goals are ambiguous or visual distractors are present. Additionally, we show that RT-Sketch has the capacity to interpret and act upon sketches with varied levels of specificity, ranging from minimal line drawings to detailed, colored drawings. For supplementary material and videos, please refer to our website: http://rt-sketch.github.io.
RT-H: Action Hierarchies Using Language
Mar 04, 2024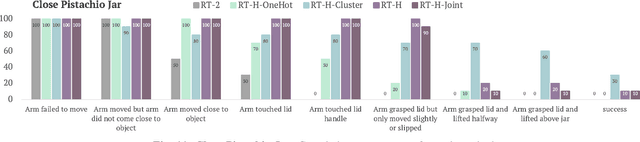
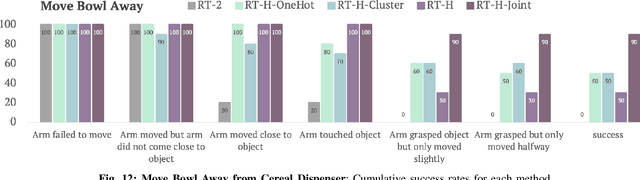
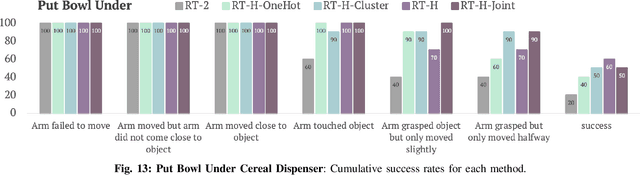
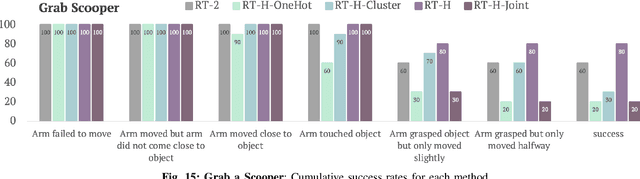
Language provides a way to break down complex concepts into digestible pieces. Recent works in robot imitation learning use language-conditioned policies that predict actions given visual observations and the high-level task specified in language. These methods leverage the structure of natural language to share data between semantically similar tasks (e.g., "pick coke can" and "pick an apple") in multi-task datasets. However, as tasks become more semantically diverse (e.g., "pick coke can" and "pour cup"), sharing data between tasks becomes harder, so learning to map high-level tasks to actions requires much more demonstration data. To bridge tasks and actions, our insight is to teach the robot the language of actions, describing low-level motions with more fine-grained phrases like "move arm forward". Predicting these language motions as an intermediate step between tasks and actions forces the policy to learn the shared structure of low-level motions across seemingly disparate tasks. Furthermore, a policy that is conditioned on language motions can easily be corrected during execution through human-specified language motions. This enables a new paradigm for flexible policies that can learn from human intervention in language. Our method RT-H builds an action hierarchy using language motions: it first learns to predict language motions, and conditioned on this and the high-level task, it predicts actions, using visual context at all stages. We show that RT-H leverages this language-action hierarchy to learn policies that are more robust and flexible by effectively tapping into multi-task datasets. We show that these policies not only allow for responding to language interventions, but can also learn from such interventions and outperform methods that learn from teleoperated interventions. Our website and videos are found at https://rt-hierarchy.github.io.
Learning to Learn Faster from Human Feedback with Language Model Predictive Control
Feb 18, 2024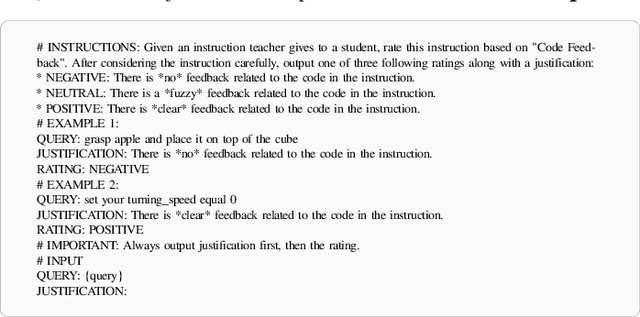
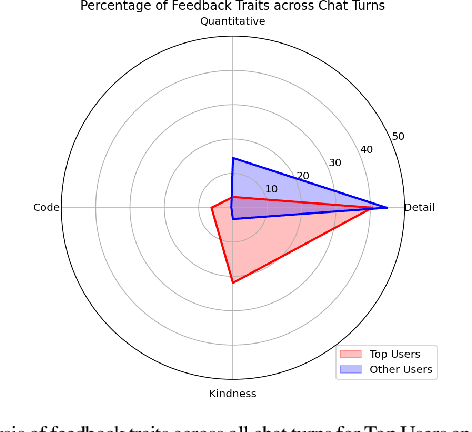

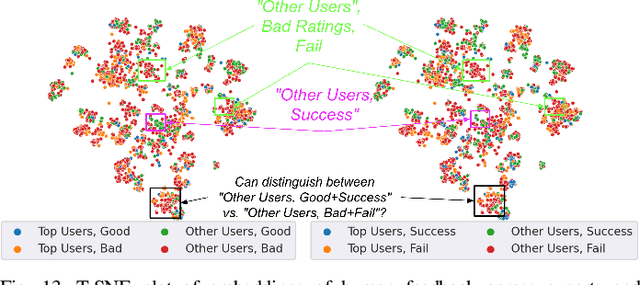
Large language models (LLMs) have been shown to exhibit a wide range of capabilities, such as writing robot code from language commands -- enabling non-experts to direct robot behaviors, modify them based on feedback, or compose them to perform new tasks. However, these capabilities (driven by in-context learning) are limited to short-term interactions, where users' feedback remains relevant for only as long as it fits within the context size of the LLM, and can be forgotten over longer interactions. In this work, we investigate fine-tuning the robot code-writing LLMs, to remember their in-context interactions and improve their teachability i.e., how efficiently they adapt to human inputs (measured by average number of corrections before the user considers the task successful). Our key observation is that when human-robot interactions are formulated as a partially observable Markov decision process (in which human language inputs are observations, and robot code outputs are actions), then training an LLM to complete previous interactions can be viewed as training a transition dynamics model -- that can be combined with classic robotics techniques such as model predictive control (MPC) to discover shorter paths to success. This gives rise to Language Model Predictive Control (LMPC), a framework that fine-tunes PaLM 2 to improve its teachability on 78 tasks across 5 robot embodiments -- improving non-expert teaching success rates of unseen tasks by 26.9% while reducing the average number of human corrections from 2.4 to 1.9. Experiments show that LMPC also produces strong meta-learners, improving the success rate of in-context learning new tasks on unseen robot embodiments and APIs by 31.5%. See videos, code, and demos at: https://robot-teaching.github.io/.
PIVOT: Iterative Visual Prompting Elicits Actionable Knowledge for VLMs
Feb 12, 2024Vision language models (VLMs) have shown impressive capabilities across a variety of tasks, from logical reasoning to visual understanding. This opens the door to richer interaction with the world, for example robotic control. However, VLMs produce only textual outputs, while robotic control and other spatial tasks require outputting continuous coordinates, actions, or trajectories. How can we enable VLMs to handle such settings without fine-tuning on task-specific data? In this paper, we propose a novel visual prompting approach for VLMs that we call Prompting with Iterative Visual Optimization (PIVOT), which casts tasks as iterative visual question answering. In each iteration, the image is annotated with a visual representation of proposals that the VLM can refer to (e.g., candidate robot actions, localizations, or trajectories). The VLM then selects the best ones for the task. These proposals are iteratively refined, allowing the VLM to eventually zero in on the best available answer. We investigate PIVOT on real-world robotic navigation, real-world manipulation from images, instruction following in simulation, and additional spatial inference tasks such as localization. We find, perhaps surprisingly, that our approach enables zero-shot control of robotic systems without any robot training data, navigation in a variety of environments, and other capabilities. Although current performance is far from perfect, our work highlights potentials and limitations of this new regime and shows a promising approach for Internet-Scale VLMs in robotic and spatial reasoning domains. Website: pivot-prompt.github.io and HuggingFace: https://huggingface.co/spaces/pivot-prompt/pivot-prompt-demo.
AutoRT: Embodied Foundation Models for Large Scale Orchestration of Robotic Agents
Jan 23, 2024Foundation models that incorporate language, vision, and more recently actions have revolutionized the ability to harness internet scale data to reason about useful tasks. However, one of the key challenges of training embodied foundation models is the lack of data grounded in the physical world. In this paper, we propose AutoRT, a system that leverages existing foundation models to scale up the deployment of operational robots in completely unseen scenarios with minimal human supervision. AutoRT leverages vision-language models (VLMs) for scene understanding and grounding, and further uses large language models (LLMs) for proposing diverse and novel instructions to be performed by a fleet of robots. Guiding data collection by tapping into the knowledge of foundation models enables AutoRT to effectively reason about autonomy tradeoffs and safety while significantly scaling up data collection for robot learning. We demonstrate AutoRT proposing instructions to over 20 robots across multiple buildings and collecting 77k real robot episodes via both teleoperation and autonomous robot policies. We experimentally show that such "in-the-wild" data collected by AutoRT is significantly more diverse, and that AutoRT's use of LLMs allows for instruction following data collection robots that can align to human preferences.
RT-Trajectory: Robotic Task Generalization via Hindsight Trajectory Sketches
Nov 06, 2023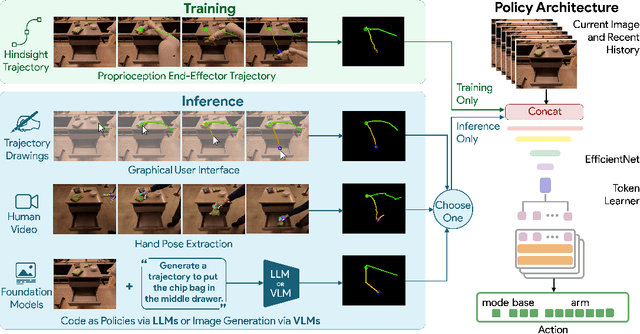
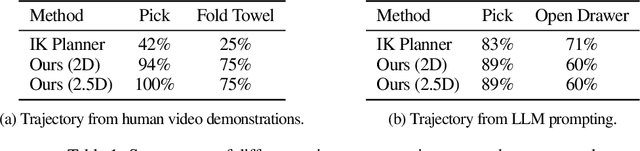
Generalization remains one of the most important desiderata for robust robot learning systems. While recently proposed approaches show promise in generalization to novel objects, semantic concepts, or visual distribution shifts, generalization to new tasks remains challenging. For example, a language-conditioned policy trained on pick-and-place tasks will not be able to generalize to a folding task, even if the arm trajectory of folding is similar to pick-and-place. Our key insight is that this kind of generalization becomes feasible if we represent the task through rough trajectory sketches. We propose a policy conditioning method using such rough trajectory sketches, which we call RT-Trajectory, that is practical, easy to specify, and allows the policy to effectively perform new tasks that would otherwise be challenging to perform. We find that trajectory sketches strike a balance between being detailed enough to express low-level motion-centric guidance while being coarse enough to allow the learned policy to interpret the trajectory sketch in the context of situational visual observations. In addition, we show how trajectory sketches can provide a useful interface to communicate with robotic policies: they can be specified through simple human inputs like drawings or videos, or through automated methods such as modern image-generating or waypoint-generating methods. We evaluate RT-Trajectory at scale on a variety of real-world robotic tasks, and find that RT-Trajectory is able to perform a wider range of tasks compared to language-conditioned and goal-conditioned policies, when provided the same training data.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023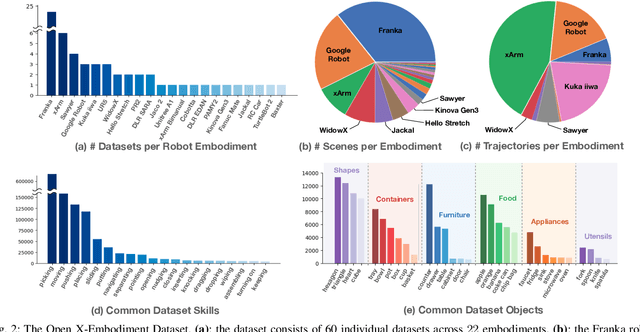
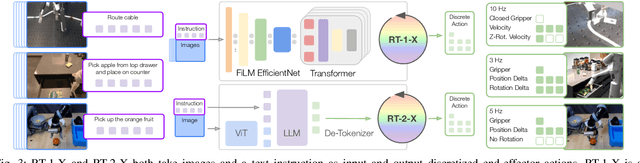
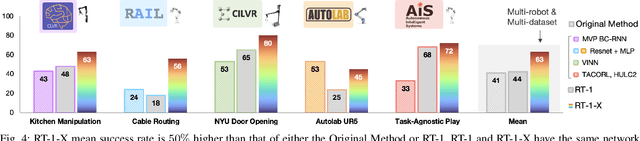
Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.